
机器人视觉语言导航迈入R1时代:香港大学与上海AI Lab联合提出全新具身智能框架
上海AILab联合研发的VLN-R1系统革新了视觉语言导航技术,实现了自然语言指令到第一人称连续动作的直接转化。该系统突破传统离散地图依赖,采用两阶段训练机制(监督微调+强化微调)和时间衰减奖励策略,在复杂环境中展现出类人导航能力。实验显示,仅2B参数的Qwen2-VL模型通过强化训练后,性能超越7B模型,并在长距离导航中实现高效跨域迁移。配套的VLN-Ego数据集(含183万样本)和记忆采样策略
你对着家里的机器人说:“去厨房,看看冰箱里还有没有牛奶。”
它不仅准确走到了厨房,还在移动过程中避开了椅子,转身打开冰箱,并回答你:“还有半瓶。”
这不是遥远的科幻,而是视觉语言导航技术的下一站。
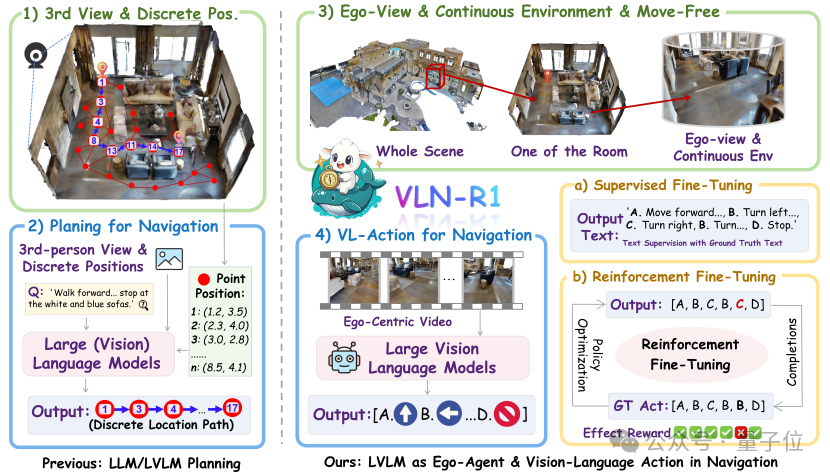
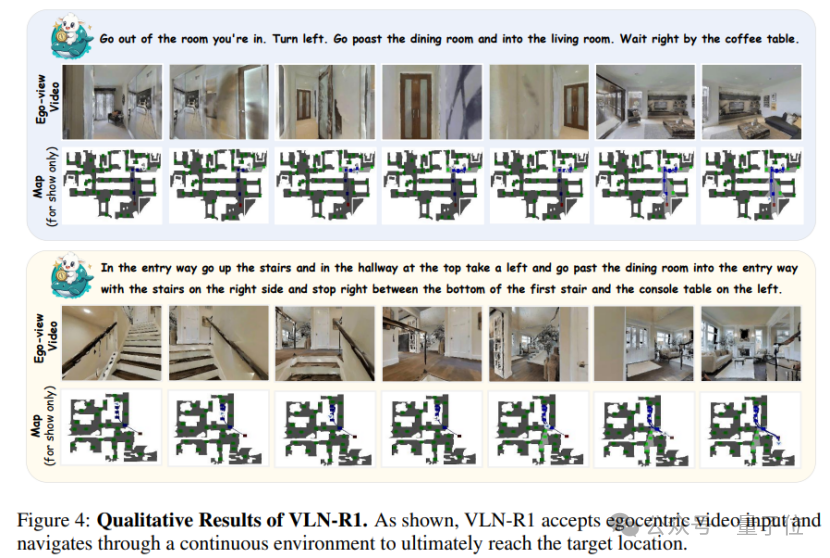
由香港大学与上海AI Lab联合提出的VLN-R1,具备将自然语言指令直接转化为第一人称视角下的连续导航动作的能力,无需依赖离散地图,能在复杂环境中灵活感知、决策与行动,实现类人级别的具身智能导航。

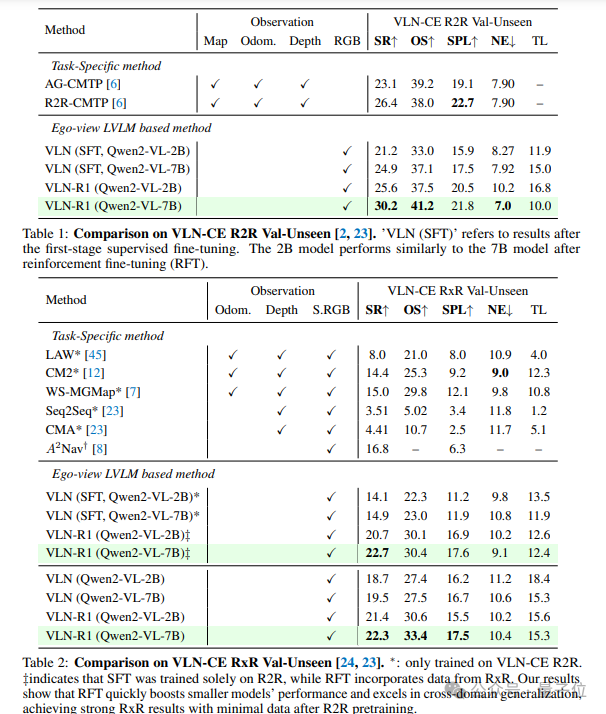
在VLN-CE基准测试中,VLN-R1展现出了很强性能,仅用Qwen2-VL-2B模型(20亿参数),通过RFT训练后就超越了7B模型的SFT结果。
更具挑战性的长距离导航中,VLN-R1实现了“跨域迁移”——在R2R上预训练后,仅用1万RxR样本进行RFT,性能就超过了使用完整RxR数据训练的模型,彰显出极强的数据效率。
VLN-R1:让LVLM采用类Deepseek-R1范式成为具身导航会思考的“大脑”
视觉语言导航(VLN)是具身人工智能领域的核心挑战之一。其核心要求是:让智能体能够基于自然语言指令(如“走到客厅的沙发旁”),在现实环境中自主完成导航任务。
这一任务的复杂性在于,智能体需要同时理解语言语义,并结合实时视觉感知来规划行动路径,实现“语言指令”与“环境交互”的跨模态融合。
当前主流的基于语言模型的导航系统,普遍依赖离散拓扑图进行路径规划。具体表现为:
-
将环境抽象为预定义的“节点”(如房间入口、走廊拐角等)和“连接边”(节点间的可行路径);
-
导航过程被限制在这些预设的节点连接范围内,无法灵活应对未标注的环境细节或动态变化(例如突然出现的障碍物);
-
这种离散化的处理方式,导致系统对复杂环境的适应性较差,难以实现真正贴近人类日常的连续导航动作(如绕开茶几、调整行走方向等)。
VLN-R1的核心突破在于打破了“视觉输入→文本描述→离散决策”的传统链条,直接让LVLM(如Qwen2-VL)以第一人称视频流为”眼睛”,输出连续导航动作(前进、左转、右转、停止)。
这一框架具有三大创新支柱:
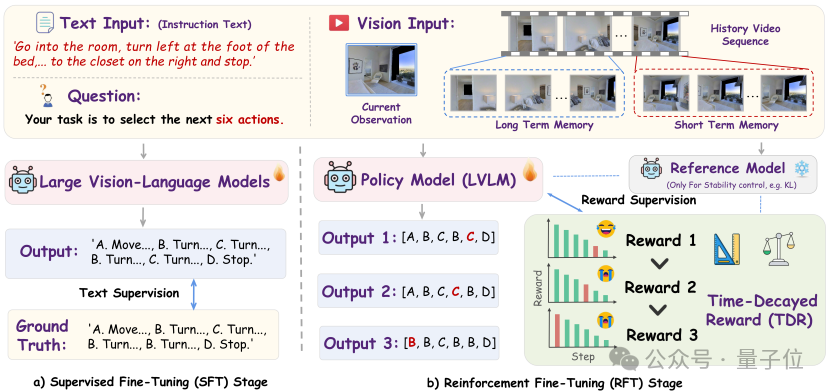
两阶段训练+时间衰减奖励:从模仿到强化的智能进化
1.监督微调(SFT):让模型先通过专家演示学习”正确动作序列的文本表达”,例如看到”前方有门”时输出”FORWARD”动作描述。
2.强化微调(RFT):为了让导航需要考虑动作的前后关联(比如现在转错方向,后面就很难到达目标)。为此,强化微调阶段引入了 “奖励机制”,让模型在试错中学会更聪明的决策:
a.分组对比优化(GRPO)
模型会针对同一组指令和画面,同时生成多个不同的动作方案(比如 8 种走法),然后通过比较这些 方案的“好坏”来优化策略:好的方案会被鼓励多生成,差的方案则减少出现,就像人类在多个选项 中选择最优路径。
这种方法不需要提前设定固定的奖励规则,而是通过方案间的相对优劣来学习,更符合真实环境的复杂性。
b.时间衰减奖励(TDR):让模型关注“眼前重点”
在真实导航场景中,当前动作的准确性直接决定了后续规划的可行性 —— 就像人类走路时若不先避开眼前的障碍物,即便远处的路线规划得再完美也会碰壁。
TDR机制正是模拟了这一人类直觉:它对近期动作(如当前步、下一步)赋予更高的奖励权重,而随着时间推移,远期动作(如 5 步之后)的权重会逐步降低。
这种设计让模型学会优先确保眼前动作的精准执行,比如先完成关键的转弯避开障碍,再循序渐进地考虑后续步骤,避免因过度关注远处目标而忽视当下的环境风险,如同人类行走时总是先看好脚下的每一步,再规划前方的行进路线。
VLN-Ego数据集:构建具身智能的“训练操场”
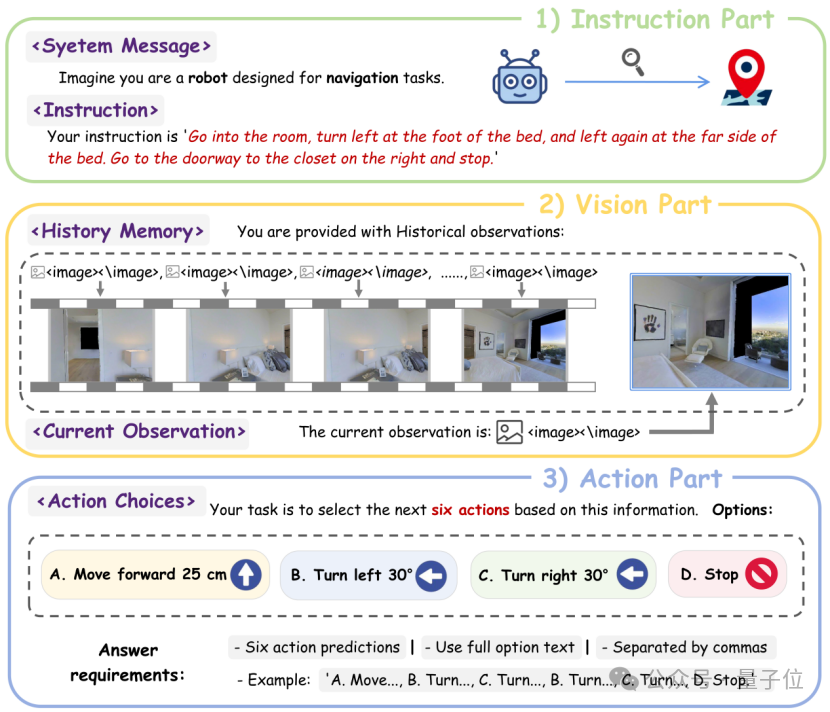
研究团队利用Habitat模拟器构建了全新的VLN-Ego数据集,包含63万R2R(房间到房间)和120万RxR(跨房间)训练样本。每个样本由三部分组成:自然语言指令(如“走过餐桌,左转进入走廊”)、第一人称历史视觉记忆与当前观测、未来6步的动作标签。
与传统数据集不同,VLN-Ego完全基于第一人称视角,摒弃了全局地图等“作弊”信息,迫使模型学会基于实时视觉输入的决策能力。
短时记忆采样:平衡历史经验与实时感知
为解决视觉序列处理中“近期信息过载、长期记忆丢失”的难题,VLN-R1提出了长短时记忆采样策略。
模型会以较高频率采样最近M步的短期记忆(如当前看到的沙发位置),同时以较低频率抽取更早的长期记忆(如走廊的初始方向),通过这种”远近结合”的方式,确保Agent在复杂环境中既不迷失方向,又能对突发情况做出反应。
实验验证:小模型超越大模型,数据效率颠覆认知
除了前文所描述的性能表现,更值得关注的是VLN-R1的”小而美”特性——通过RFT优化,2B模型性能直逼7B模型,这为资源受限场景(如家用机器人)的落地提供了可能。
具身智能的未来:从导航到认知的全链路升级
该研究的核心启示在于:具身智能的关键不是复杂的模块化设计,而是让模型像人类一样,通过“感知-决策-行动”的闭环进行学习。VLN-R1证明,LVLM完全有能力成为这个闭环的“控制中枢”,而时间衰减奖励等机制则为模型注入了对物理世界时序规律的理解。
随着VLN-Ego数据集与配套训练框架的开放,该方法的可复现性和拓展性正在提升。从工厂物流机器人到家庭服务助手,该框架正在促进AI从“数字智能”向“具身认知”跨越。
如何学习AI大模型?
我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。
我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在人工智能学习中的很多困惑,所以在工作繁忙的情况下还是坚持各种整理和分享。但苦于知识传播途径有限,很多互联网行业朋友无法获得正确的资料得到学习提升,故此将并将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】


第一阶段: 从大模型系统设计入手,讲解大模型的主要方法;
第二阶段: 在通过大模型提示词工程从Prompts角度入手更好发挥模型的作用;
第三阶段: 大模型平台应用开发借助阿里云PAI平台构建电商领域虚拟试衣系统;
第四阶段: 大模型知识库应用开发以LangChain框架为例,构建物流行业咨询智能问答系统;
第五阶段: 大模型微调开发借助以大健康、新零售、新媒体领域构建适合当前领域大模型;
第六阶段: 以SD多模态大模型为主,搭建了文生图小程序案例;
第七阶段: 以大模型平台应用与开发为主,通过星火大模型,文心大模型等成熟大模型构建大模型行业应用。

👉学会后的收获:👈
• 基于大模型全栈工程实现(前端、后端、产品经理、设计、数据分析等),通过这门课可获得不同能力;
• 能够利用大模型解决相关实际项目需求: 大数据时代,越来越多的企业和机构需要处理海量数据,利用大模型技术可以更好地处理这些数据,提高数据分析和决策的准确性。因此,掌握大模型应用开发技能,可以让程序员更好地应对实际项目需求;
• 基于大模型和企业数据AI应用开发,实现大模型理论、掌握GPU算力、硬件、LangChain开发框架和项目实战技能, 学会Fine-tuning垂直训练大模型(数据准备、数据蒸馏、大模型部署)一站式掌握;
• 能够完成时下热门大模型垂直领域模型训练能力,提高程序员的编码能力: 大模型应用开发需要掌握机器学习算法、深度学习框架等技术,这些技术的掌握可以提高程序员的编码能力和分析能力,让程序员更加熟练地编写高质量的代码。

1.AI大模型学习路线图
2.100套AI大模型商业化落地方案
3.100集大模型视频教程
4.200本大模型PDF书籍
5.LLM面试题合集
6.AI产品经理资源合集
👉获取方式:
😝有需要的小伙伴,可以保存图片到wx扫描二v码免费领取【保证100%免费】🆓

更多推荐


 24
24 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)