
Python实现深度强化学习DQN算法实战教程

简介:深度强化学习(DQN)结合了深度学习的表征能力和强化学习的决策策略,特别适合处理高维度状态空间问题。本文将介绍强化学习基本概念、DQN算法原理,并指导读者如何在Python环境中搭建DQN模型,包括环境模拟、网络结构设计、经验回放缓冲区和目标网络使用等关键步骤。学习者将通过实际代码和项目操作,深入了解如何使用Python进行强化学习,并能对DQN模型进行训练、评估与调整,为进一步研究高级强化学习算法奠定基础。 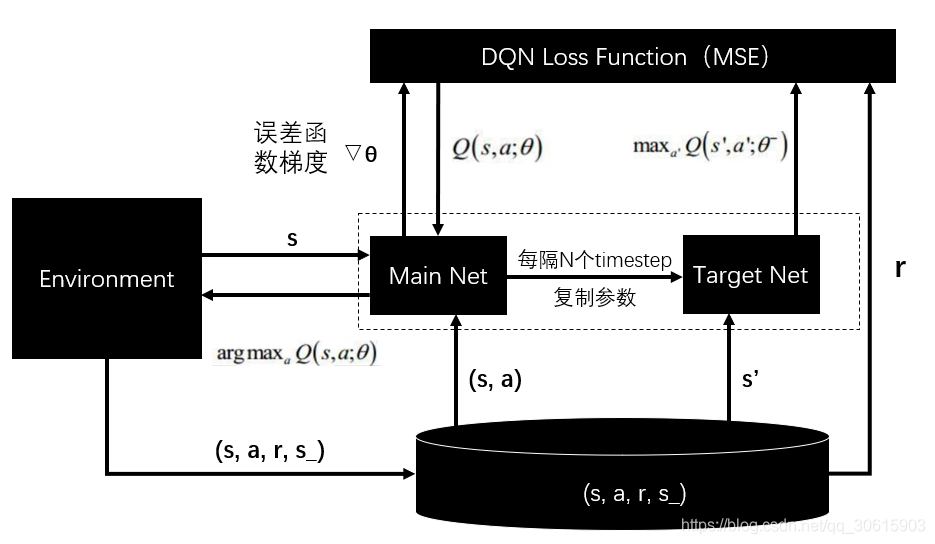
1. 强化学习基础
强化学习是机器学习的一个重要分支,它关注如何在不确定的环境中通过交互来进行决策。简单来说,它是一种使智能体(Agent)通过尝试和错误来学习如何在特定环境中作出决策以最大化某种累积奖励(Reward)的技术。强化学习的主要特点是它不依赖于预先标记的数据,而是通过与环境的动态交互来学习策略(Policy)。
在强化学习中,智能体与环境的交互过程可以用马尔可夫决策过程(MDP)来描述,包括状态(State)、动作(Action)、奖励(Reward)、策略(Policy)和价值函数(Value Function)。强化学习的目标是找到最优策略,使得智能体在长期累计获得的奖励最大。
强化学习算法的核心在于探索(Exploration)和利用(Exploitation)的平衡。探索是指智能体尝试新的、未知的动作以发现可能更高奖励的行为;而利用是指智能体使用已知的信息去最大化即时奖励。这一平衡是通过诸如ε-greedy、Softmax选择等策略来实现的。
本章主要介绍了强化学习的基本概念和特性,为进一步探索深度强化学习(如DQN)打下了基础。在接下来的章节中,我们将深入探讨DQN的工作原理及其实现细节。
2. 深度强化学习(DQN)原理
2.1 DQN的基本概念和原理
2.1.1 强化学习的定义和特点
强化学习是机器学习中的一个分支,它关注如何基于环境做出决策以最大化某种累积奖励。强化学习的主要特点是通过与环境的交互来学习策略,而非从标注数据中学习,这一点与监督学习和无监督学习形成鲜明对比。在强化学习框架中,智能体通过不断尝试执行动作并观察结果(奖励或惩罚),逐渐学习到如何根据当前环境状态选择最优动作。
在实际应用中,强化学习模型往往需要处理高维输入(如图像数据),这在传统的强化学习模型中是很难实现的。深度学习技术,尤其是深度神经网络的引入,为处理高维输入数据提供了可能,这便是深度强化学习(DQN)的由来。
2.1.2 DQN的出现背景和优势
DQN是深度强化学习领域的重要突破,其核心是将深度神经网络应用于强化学习的函数逼近器,从而能够处理和学习复杂的、高维的输入数据。DQN通过学习输入状态到动作价值函数(Q-value function)的映射,有效地解决了传统强化学习方法难以直接应用于原始感知数据的问题。
DQN的主要优势在于其能够通过深度神经网络自动地提取状态特征,无需人工设计特征提取器。此外,DQN引入了经验回放缓冲区(Experience Replay Buffer)和目标网络(Target Network),这两大创新显著提高了学习过程的稳定性和效率。
2.2 DQN的工作机制
2.2.1 深度神经网络的引入
在DQN中,深度神经网络用于近似状态动作价值函数Q(s, a)。通过网络的训练,能够学习到一个近似最优的动作价值函数,从而指导智能体选择动作。具体来说,神经网络接受当前状态作为输入,输出对应每个可能动作的预测价值,智能体根据这个预测价值选择动作。
深度神经网络的引入极大地提高了强化学习模型处理复杂问题的能力,尤其在诸如 Atari 游戏这样的视觉输入任务中表现突出。
2.2.2 模型训练过程解析
DQN的训练过程可以分为几个关键步骤:首先,智能体在环境中采取动作,收集状态转移样本(s, a, r, s')。接着,这些样本被存储在经验回放缓冲区中。在训练时,智能体会从这个缓冲区中随机抽取一批样本进行学习,利用梯度下降方法更新神经网络参数,以减小预测价值与实际回报的差异。
这种训练方式不仅提高了数据的利用效率,还帮助缓解了在训练过程中出现的相关性问题和稳定性问题。
2.3 DQN的关键技术和创新点
2.3.1 经验回放缓冲区的作用
经验回放缓冲区是DQN中一个重要的组成部分,它不仅存储了智能体与环境交互产生的经验,还允许智能体在训练时随机重放这些经验。这样的机制打破了时间上的关联性,使得每个样本可以被多次利用,增加了样本的利用率,提升了学习的稳定性。
缓冲区的大小通常是一个固定的值,当缓冲区被填满后,新经验将替换掉最旧的经验。这允许模型不仅学习到最新的策略,也能够从历史经验中学习到有用的知识。
2.3.2 目标网络的应用和意义
在DQN中,目标网络是另一个关键创新。它是一个与主网络结构相同的神经网络,但在一定步数后才进行更新。目标网络用于在计算目标值时提供稳定的输出,防止在训练过程中目标值产生剧烈波动,从而导致学习过程的不稳定。
通过引入目标网络,DQN将学习目标从一个动态变化的目标转化为一个相对稳定的目标,有效缓解了学习过程中的发散问题,使得训练过程更加稳定和高效。
3. Python实现DQN算法
3.1 Python在DQN算法中的作用
3.1.1 Python在深度学习中的优势
Python由于其简洁、易读、可扩展的特性,已经成为机器学习和深度学习领域的主流编程语言。Python中的高级数据结构,如字典、列表等,使得数据的处理变得非常高效。此外,Python拥有强大的社区支持和丰富的库资源,包括NumPy、SciPy、Pandas、Matplotlib等,这些都为数据处理、可视化以及科学计算提供了便利。在深度学习领域,Python同样表现出色。TensorFlow、Keras、PyTorch等流行框架都是用Python编写的,这使得Python在深度学习领域的应用变得十分广泛。
Python在DQN算法中的作用不仅限于数据处理和模型搭建,还在于其能够支持快速的原型设计。DQN算法的实现相对复杂,需要大量的数据迭代和参数调优。Python通过其简洁的语法和强大的科学计算能力,极大地降低了研究者和开发者的门槛。
3.1.2 Python实现DQN的基本步骤
实现DQN算法可以分为几个关键步骤,如下:
-
环境准备 :首先需要准备开发环境,安装必要的Python库。这包括深度学习框架TensorFlow或PyTorch,以及其他一些辅助库如NumPy、Pandas等。
-
网络定义 :接着定义深度神经网络模型。这个模型将被用来近似Q函数,以预测在给定状态下采取某个动作的价值。
-
经验回放缓冲区 :创建一个经验回放缓冲区来存储智能体的经验,以便后续使用这些经验进行训练。
-
训练循环 :实现训练循环,智能体将在这个循环中不断与环境交互,收集经验,并使用这些经验更新神经网络。
-
评估与优化 :在训练过程中定期评估模型性能,并根据需要调整超参数。
3.2 Python环境搭建和库依赖
3.2.1 Python环境的搭建
搭建Python环境,可以使用Anaconda这一便捷的Python分发版本,它预装了许多科学计算的库,大大简化了安装和环境配置的复杂性。可以通过Conda或pip这样的包管理器安装额外的库。
3.2.2 必要的库和框架介绍
-
NumPy :用于高性能的多维数组对象和工具库,是Python科学计算的基础。
-
TensorFlow/Keras :TensorFlow是一个开源的机器智能库,提供了多种API,Keras则被集成为TensorFlow的一部分,简化了深度学习模型的搭建、训练和部署。
-
PyTorch :由Facebook开发的一个开源机器学习库,它支持动态计算图,适合进行研究工作。
-
OpenAI Gym :一个用于开发和比较强化学习算法的工具包,提供了各种模拟环境。
在Python中,可以通过如下的pip命令安装这些依赖库:
pip install numpy tensorflow gym
或者使用conda命令进行安装:
conda install numpy tensorflow gym
接下来,我们将介绍如何使用Python和这些库来搭建和实现DQN算法。
4. 环境模拟与Gym库使用
4.1 了解Gym库和模拟环境
4.1.1 Gym库的基本介绍
Gym是由OpenAI推出的一款用于开发和比较强化学习算法的工具包。它提供了大量的模拟环境,让研究者可以在没有实际机器人或者物理实验设备的情况下进行算法的测试和开发。Gym库是用Python编写的,其接口简单易懂,且兼容性强,能够与许多主流的深度学习框架相结合。
Gym的环境可以分为以下几类: - 离散控制:例如Atari游戏、CartPole等。 - 连续控制:例如HalfCheetah、Hopper等。 - 问题解决:例如算法在特定任务上是否能够达到预定目标。 - 组合:包含多个子任务,需要策略组合来完成。
4.1.2 如何使用Gym库创建环境
使用Gym库创建环境非常简单。首先,你需要安装Gym库,然后导入并创建一个环境实例。以下是创建环境的一个基本示例代码:
import gym
# 创建一个环境实例
env = gym.make('CartPole-v1')
# 重置环境,获得初始状态
initial_state = env.reset()
# 执行一个动作
action = 1 # 例如,对于CartPole-v1,动作1通常表示向右推动
next_state, reward, done, info = env.step(action)
# 判断是否完成一轮
if done:
print("Episode finished")
else:
print("Continue the episode")
# 关闭环境
env.close()
4.2 构建自定义环境
4.2.1 自定义环境的需求分析
在研究和开发新的强化学习算法时,可能会遇到Gym提供的标准环境无法满足特定需求的情况。这时,就需要构建自定义环境。自定义环境应满足以下需求:
- 兼容性 :新环境需要与Gym的API兼容,以便可以直接用于已有的强化学习算法。
- 可扩展性 :环境应设计成模块化的,可以轻松地添加新的规则、奖励函数和任务目标。
- 稳定性 :环境需要稳定,能够接受大量随机动作并提供准确的状态反馈。
4.2.2 自定义环境的实现方法
创建自定义Gym环境通常涉及以下几个步骤:
- 继承Gym的环境基类 :创建一个Python类,继承自
gym.Env,并实现__init__,reset,step,render等方法。 - 定义状态空间和动作空间 :根据问题定义环境的状态空间和动作空间。
- 实现环境动力学 :编写代码以描述状态转移和奖励函数。
- 编写渲染方法 :如果需要可视化环境,还需要实现
render方法。
以下是一个简单的自定义环境示例:
import gym
from gym import spaces
import numpy as np
class SimpleEnv(gym.Env):
metadata = {'render.modes': ['human']}
def __init__(self):
self.observation_space = spaces.Box(low=0, high=10, shape=(1,))
self.action_space = spaces.Discrete(2)
self.state = None
def reset(self):
self.state = np.random.randint(0, 10)
return self.state
def step(self, action):
if action == 0:
self.state -= 1
else:
self.state += 1
reward = 0
if self.state > 8:
reward = 10
done = True
elif self.state < 2:
done = True
else:
done = False
return self.state, reward, done, {}
def render(self, mode='human'):
print(f'Current state: {self.state}')
在上面的例子中,我们创建了一个简单的环境,其中状态空间是 [0, 10] 之间的整数,动作空间是两个离散动作(向左或向右)。环境会根据动作更新状态,并根据状态给予奖励。
通过这样的自定义环境实现,研究人员可以灵活地为新的研究问题设计特定的模拟环境,从而更好地测试和优化他们的强化学习算法。
5. Q网络构建
在强化学习中,Q网络是核心组成部分,它负责评估每一个可能行为的价值。在深度强化学习中,这个网络是深度神经网络,也叫做深度Q网络(Deep Q-Network, DQN)。本章节将详细介绍深度神经网络在DQN中的应用以及Q网络的构建和优化。
5.1 深度神经网络在DQN中的应用
5.1.1 神经网络的基本原理
深度神经网络(DNN)是一种模仿大脑神经网络结构和功能的算法模型。它由多层感知器组成,每一层包含若干神经元。DNN能够从大量数据中学习复杂的特征表示,具备高度的非线性映射能力,因此在处理高维输入数据时表现出色,尤其适用于图像、语音和自然语言处理等任务。
5.1.2 神经网络在DQN中的作用
在DQN中,深度神经网络用于学习和存储一个Q函数,即从状态到动作价值的映射。神经网络通过训练,能够逼近最优的Q值,使代理在与环境交互的过程中做出正确的决策。Q网络的输出是一个向量,每个元素代表采取相应动作的预期回报。
代码实现
下面是一个简单的DQN的Q网络构建的代码示例,使用PyTorch框架实现:
import torch
import torch.nn as nn
import torch.nn.functional as F
class QNetwork(nn.Module):
def __init__(self, num_states, num_actions):
super(QNetwork, self).__init__()
self.num_states = num_states
self.num_actions = num_actions
self.fc1 = nn.Linear(num_states, 64) # 输入层到隐藏层1
self.fc2 = nn.Linear(64, 64) # 隐藏层1到隐藏层2
self.fc3 = nn.Linear(64, num_actions) # 隐藏层2到输出层
def forward(self, x):
x = F.relu(self.fc1(x)) # 使用ReLU激活函数
x = F.relu(self.fc2(x))
return self.fc3(x)
# 假设我们有一个状态空间大小为10,动作空间大小为2
net = QNetwork(num_states=10, num_actions=2)
参数说明
num_states:状态空间的维度。num_actions:动作空间的维度。nn.Linear:线性层,实现全连接操作。F.relu:ReLU激活函数,增加网络的非线性。forward方法:定义了网络的前向传播路径。
5.2 Q网络的构建和优化
5.2.1 Q网络的结构设计
在设计Q网络时,需要考虑网络的深度、宽度和架构。常见的结构选择包括全连接层、卷积层或循环层,这取决于输入数据的性质。例如,图像数据通常使用具有卷积层的网络结构,而序列数据可能更适合使用循环神经网络(RNN)。
5.2.2 Q网络的参数调优和训练
Q网络的训练目标是最小化损失函数,损失函数通常选择均方误差(MSE)。参数调整(即权重更新)则通过反向传播和梯度下降实现。优化算法有多种选择,如随机梯度下降(SGD)、Adam等。
代码实现
以下是一个简单的DQN训练循环的代码示例,包括损失函数和优化器的设置:
import numpy as np
# 损失函数选择MSE
criterion = nn.MSELoss()
# 优化器选择Adam,并设置学习率
optimizer = torch.optim.Adam(net.parameters(), lr=0.001)
# 训练过程
num_episodes = 1000
for episode in range(num_episodes):
state = ... # 获取初始状态
done = False
while not done:
action = ... # 根据当前策略选择动作
next_state = ... # 执行动作并观察新状态
reward = ... # 获取即时回报
# 计算目标Q值
target = reward
if not done:
target = reward + gamma * torch.max(net(next_state))
else:
target = reward
# 计算预测Q值
pred = net(state)[action]
# 计算损失并反向传播
loss = criterion(pred, target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
state = next_state # 更新状态
done = ... # 判断是否结束
参数说明
MSELoss:均方误差损失函数,用于训练回归任务。Adam:一种自适应学习率优化算法。gamma:折扣因子,决定未来奖励的当前价值。max:选取Q网络输出中的最大值,表示可能的最大回报。
操作步骤
- 初始化损失函数和优化器。
- 在每个训练周期(episodes),初始化环境状态。
- 在每个步骤中,选择动作、执行动作、观察回报和新状态。
- 使用目标Q值和预测Q值计算损失。
- 执行反向传播,更新网络参数。
- 更新状态,判断是否结束当前周期。
优化策略
Q网络训练过程中的优化策略包括:
- 经验回放(Experience Replay) :存储历史经验并从中随机抽样进行训练,打破了样本间时间相关性,提高了学习效率。
- 目标网络(Target Network) :使用一个固定的目标网络更新参数,使得学习过程更加稳定。
训练流程图
mermaid流程图可以用来描述Q网络的训练流程:
graph LR
A[开始] --> B[初始化参数]
B --> C[初始化环境状态]
C --> D{是否完成此周期?}
D -- 否 --> E[选择动作]
E --> F[执行动作]
F --> G[接收回报与新状态]
G --> H[计算损失]
H --> I[参数更新]
I --> D
D -- 是 --> J[结束此周期]
J --> K{是否完成所有周期?}
K -- 否 --> C
K -- 是 --> L[训练结束]
该流程图清晰地描绘了Q网络训练的步骤,包括每个决策和操作点,确保了训练过程的逻辑性与完整性。
6. 经验回放缓冲区设计
6.1 经验回放缓冲区的必要性
6.1.1 经验回放缓冲区的作用
在强化学习中,特别是深度强化学习(DQN)算法中,经验回放缓冲区(Replay Buffer)扮演着至关重要的角色。缓冲区的核心思想是打破样本间的关联性,提供一个随机的数据采样过程,这对于改善学习的稳定性和效率至关重要。
当智能体在环境中交互时,每次交互都会生成一条经验(状态、动作、奖励、下一个状态和终止标志),这些经验被存储在经验回放缓冲区中。在学习过程中,通过随机从缓冲区中采样一批经验,智能体可以进行学习更新,从而减少由于样本相关性引起的过拟合问题。此外,经验回放使得智能体能够重复利用旧的经验,这在样本采集成本高昂或有限的情况下尤为重要。
6.1.2 设计缓冲区的数据结构
经验回放缓冲区可以被设计为一个简单的队列,其中每个元素代表一个经验。通常,这些经验被存储为一个五元组: (s, a, r, s', d) ,其中 s 是当前状态, a 是采取的动作, r 是相应的即时奖励, s' 是采取动作后达到的新状态,而 d 是终止标志,指示是否到达了回合的结束。
缓冲区通常会有一个最大容量,一旦达到容量上限,新经验会替换掉最旧的经验。这样的设计既保证了数据的多样性,也避免了无限增长的数据存储问题。
from collections import deque
# 设置缓冲区最大容量
buffer_size = 10000
# 初始化经验回放缓冲区
experience_replay_buffer = deque(maxlen=buffer_size)
在Python代码中, deque 是一个双端队列,非常适合用作回放缓冲区,因为它允许在两端进行高效的操作。
6.2 缓冲区的数据管理和优化
6.2.1 数据的存储和检索
存储到经验回放缓冲区的数据需要能够被高效检索,因为智能体在训练时会随机地从缓冲区中抽样。存储的数据结构必须平衡存储效率和检索效率。 deque 提供了时间复杂度为O(1)的两端操作,适合存储和检索操作频繁的场景。
数据检索通常在训练过程中进行,通过从缓冲区中随机抽取一定数量的经验样本来进行。这个数量可以是一个超参数,例如每批次(batch)的大小。
import random
def sample_from_buffer(batch_size):
# 随机抽取一个批次的经验
batch = random.sample(experience_replay_buffer, batch_size)
return batch
# 例如抽取批次大小为32的经验批次
batch = sample_from_buffer(32)
6.2.2 缓冲区的更新策略
缓冲区的更新策略决定了数据的新旧平衡,以及如何处理新旧数据。最简单的策略是“先进先出”(FIFO),即新数据替换掉最旧的数据。然而,在一些情况下,可能希望保留一些非常重要的旧数据,或者根据某些规则(如时间衰减)进行数据的淘汰。
一个常见的更新策略是使用优先级队列,其中的经验根据某些标准(如TD-error)赋予不同的优先级,智能体更有可能从优先级较高的经验中学习。
class PriorityExperienceReplayBuffer:
def __init__(self, size, alpha):
self.buffer = []
self.priorities = []
self.size = size
self.alpha = alpha
def push(self, state, action, reward, next_state, done):
experience = (state, action, reward, next_state, done)
self.buffer.append(experience)
# 计算优先级,这里简单使用TD-error
priority = 1 # 实际中应该是计算出的TD-error
self.priorities.append(priority)
def sample(self, batch_size):
# 根据优先级进行采样
pass # 实现细节省略
def update_priorities(self, indices, errors):
# 更新优先级
pass # 实现细节省略
在上述 PriorityExperienceReplayBuffer 类的实现中,我们添加了优先级管理的逻辑,以支持非均匀的经验采样策略。
经验回放缓冲区的设计与优化,是提升DQN算法训练稳定性和效率的关键因素之一。 在下一节中,我们将探讨如何设计和训练Q网络,这是DQN算法的核心所在。
7. 固定目标网络与主网络同步
在深度强化学习中,固定目标网络(target network)是用来稳定学习过程的重要策略。它与主网络(primary network)结构相同,但是在学习过程中参数更新较慢,以此来稳定Q值的目标。本章将详细介绍目标网络的工作原理以及如何实现它与主网络的同步。
7.1 目标网络的原理和实现
7.1.1 目标网络的基本原理
深度强化学习中的目标网络,是通过引入一个时间延迟的机制来减少学习过程中的数据关联性,从而提高学习的稳定性。在标准的Q-learning中,由于每次更新都使用最新的参数值,这导致目标值(target values)频繁变动,影响学习的收敛性。目标网络通过固定一段时间内的参数,降低了目标值的波动性,从而使得学习过程更加稳定。
7.1.2 目标网络与主网络同步策略
在实践中,目标网络的参数通常每隔一定数量的更新周期后才会更新一次。这可以通过复制主网络的参数到目标网络来实现。具体实现时,可以根据具体的任务调整更新频率。例如,在经典DQN算法中,目标网络的参数每隔一定步数(如10,000步)才会更新一次,以维持目标值的稳定性。
7.2 网络同步的优化方法
7.2.1 同步频率的调整和策略
同步频率的调整是优化目标网络稳定性的关键因素之一。如果同步频率太高,目标网络和主网络之间的差异就会太小,无法起到稳定目标值的作用;如果频率太低,则可能导致目标网络的参数和最优策略的偏差过大。实践中,选择合适的同步频率通常需要依据具体问题进行实验和调整。
7.2.2 同步机制的稳定性分析
除了调整频率之外,还可以考虑其他同步机制来提高稳定性。例如,可以尝试软更新(soft update)策略,即在更新目标网络时,不是简单地将主网络的参数复制到目标网络,而是以一定的比例混合更新。这种方式允许目标网络参数逐渐接近主网络参数,有助于平滑学习过程。
# 目标网络参数软更新的示例代码
def soft_update(target, source, tau):
for target_param, param in zip(target.parameters(), source.parameters()):
target_param.data.copy_(target_param.data * (1.0 - tau) + param.data * tau)
上述代码块展示了软更新的函数实现,其中 tau 是软更新的速率参数,取值范围通常在(0, 1]之间。 tau 越小,更新越平滑,目标网络的参数变化越慢。
总结来说,固定目标网络与主网络同步是深度强化学习中用于稳定学习过程的关键技术。通过合理设计同步频率和机制,可以显著提升算法的收敛速度和稳定性。在实际应用中,我们需要针对具体问题调整这些参数,并通过实验验证其有效性。
简介:深度强化学习(DQN)结合了深度学习的表征能力和强化学习的决策策略,特别适合处理高维度状态空间问题。本文将介绍强化学习基本概念、DQN算法原理,并指导读者如何在Python环境中搭建DQN模型,包括环境模拟、网络结构设计、经验回放缓冲区和目标网络使用等关键步骤。学习者将通过实际代码和项目操作,深入了解如何使用Python进行强化学习,并能对DQN模型进行训练、评估与调整,为进一步研究高级强化学习算法奠定基础。
更多推荐


 29
29 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)