
深度学习-5.深度模型的优化
优化学习和纯优化有什么不同经验风险最小化代理损失函数和提前终止批量算法和小批量算法神经网络优化中的挑战病态局部极小值高原、鞍点和其他平坦地区悬崖和梯度爆炸长期依赖非精确梯度优化的理论限制基本算法随机梯度下降动量Nesterov动量参数初始化策略自适应学习率算法AdaGradRMSPropAdam选择正确的优化算法二阶近似方法牛顿法共轭梯度BFGS优化策略和元算法批标准化坐标下降Polyak平均监督
优化
优化函数
经验风险最小化
这是一种比较常见的方法,将最小化风险变成了一个可以被优化算法解决的优化问题,经验风险函数为:
E x , y ∼ p d a t a [ L ( f ( x ; θ ) , y ] = 1 m ∑ i = 1 m L ( f ( x ( i ) ; θ ) , y ( i ) ) \mathbb E _{x,y\sim p_{data}}[L(f(x;\theta),y]=\frac1m\sum^m_{i=1}L(f(x^{(i)};\theta), y^{(i)}) Ex,y∼pdata[L(f(x;θ),y]=m1i=1∑mL(f(x(i);θ),y(i))
但是,这种方式很容易过拟合。
代理损失函数
代理损失函数使原函数的替代形式,如01损失转换成负对数等。相较于之前的优化函数,他能从样本集里抽取到更多信息。
批量算法和小批量算法
使用整个训练集优化的算法被称为批量或确定性梯度算法。
使用单个样本优化的算法被称为随机或在线算法。
大多数深度学习算法介于二者之间,选择小批量进行优化。
- 更大的批量会计算更精确的梯度估计,但回报小
- 极小的批量无法充分利用多核架构
- 在某些硬件上使用2的幂次的批量大小可以获得更少的运行时间
- 小批量学习时可能是由于加入了噪声,会产生一些正则化效果。泛化误差在批量大小为1时最好
神经网络优化中的挑战
- 病态
见深度学习-1.数值计算 - 局部极小值
在低维空间中非凸函数很可能会出现一些局部极小值点,较为常见。 - 高原、鞍点和其他平坦地区
在高维空间中很少出现局部极小值点,鞍点却经常出现。此时无法使用牛顿法,而无鞍牛顿法应运而生。 - 悬崖和梯度爆炸
多层神经网络通常存在像悬崖一样的斜率较大的区域,遇到这种情况时可以使用梯度截断的方式。 - 长期依赖
神经网络学习新的样本特征时把旧的特征遗忘了。例如RNN中需要经常使用相同的权重矩阵 W t W^t Wt,假设该矩阵能够进行特征值分解,则 W t = V d i a g ( λ ) t V − 1 W^t = V diag(\lambda)^tV^{-1} Wt=Vdiag(λ)tV−1,显然当t增大时,特征值累乘会发生梯度爆炸和梯度消失的问题 - 非精确梯度
当目标函数难以计算梯度时,或目标函数不可解时,只能对梯度进行近似。 - 局部和全局结构的弱对应
例如优化函数没有局部极小值点,最小值只能在边界上寻找到时: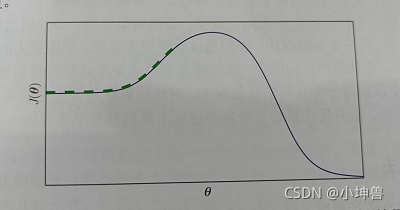
随着梯度下降很有可能找不到右侧的最小值,而陷入了左侧的“最小值” - 优化的理论限制
一些研究表明,任何一种深度学习优化算法都有性能上的限制。
基本算法
随机梯度下降
Require:学习率r,初始参数theta
while 停止准则未满足:
随机抽取batchsize个样本
计算梯度g
应用更新theta = theta - r * g
- 总结:最为常用的优化算法,重点在于选取学习率
动量
Require: 学习率r,动量参数alpha,初始参数theta,初始速度v
while 停止准则为满足:
随机抽取batchsize个样本
计算梯度g
计算速度更新v = a * v - r * g
应用更新theta = theta + v
- 总结:主要是为了解决病态问题
Nesterov动量
Require: 学习率r,动量参数alpha,初始参数theta,初始速度v
while 停止准则为满足:
随机抽取batchsize个样本
计算梯度g !!(关于theta + alpha * v)!!
计算速度更新v = a * v - r * g
应用更新theta = theta + v
- 总结:主要也是为了解决病态问题,在凸批量梯度的情况下收敛率从O(1/k)改进到了O(1/k^2)
参数初始化策略
- 标准初始化: W i , j ∼ U ( − 6 m + n , 6 m + n ) W_{i,j}\sim U(-\sqrt\frac{6}{m+n},\sqrt\frac{6}{m+n}) Wi,j∼U(−m+n6,m+n6)
- 随机正交初始化:初始化为随机正交矩阵
- 系数初始化:每个单元初始化为恰好有k个非零权重
自适应学习率算法
AdaGrad
- 对于偏导大的参数增大学习率,反之减小学习率
Require:全局学习率epsilon,初始参数theta,小常数delta
初始化梯度累积变量r = 0
while 没有达到停止准则:
选取样本x -> y
计算梯度g
累积平方梯度 r += g * g
应用更新 theta -= epsilon / (delta + sqrt(r)) * g
- 适用于凸优化问题,有令人满意的结果
- 从训练开始时积累梯度平方和会导致有效学习率过早和过量减小
RMSProp
- AdaGrad的改进,使其在非凸优化问题上效果变好,将梯度累计变成指数加权的移动平均
Require:全局学习率epsilon,衰减速率rho,初始参数theta,小常数delta
初始化累计变量r = 0
while 没有达到停止准则:
选取样本x -> y
计算梯度g
累积平方梯度 r = rho * r + (1 - rho) * g * g
应用更新 theta -= epsilon / (sqrt(delta + r)) * g # 逐元素计算
- 该算法已被证明是一种有效且实用的深度神经网络优化算法
Adam
- 另一种学习率自适应算法
Require:步长epsilon,矩估计衰减速率p1,p2(建议默认为0.9和0.99)
Require:初始参数theta,数值稳定用的小常数delta(建议默认为1e-8)
s, r = 0, 0 # 初始化一阶二阶矩变量
t = 0 # 初始化时间步
while 没有达到停止准则:
选取样本x -> y
计算梯度g
t += 1
s = p1 * s + (1 - p1) * g # 更新一阶有偏矩估计
r = p2 * r + (1 - p2) * g * g # 更新二阶有偏矩估计
ss = s / (1 - p1 ^ t) #修正一阶矩的偏差
rr = r / (1 - p2 ^ t) #修正二阶矩的偏差
theta -= epsilon * ss / (sqrt(rr) + delta)
- 对超参数的选择相当鲁棒
二阶近似方法
牛顿法
每轮迭代参数 θ \theta θ时,使用二阶海森矩阵迭代:
θ = θ − H − 1 g \theta = \theta - H^{-1}g θ=θ−H−1g
带牛顿法在鞍点附近(海森矩阵非正定)会失效,因此需要做一个正则化来近似
θ ∗ = θ 0 − [ H ( f ( θ 0 ) ) + α I ] − 1 ∇ θ f ( θ 0 ) \theta^* = \theta_0-[H(f(\theta_0)) + \alpha I]^{-1}\nabla_\theta f(\theta_0) θ∗=θ0−[H(f(θ0))+αI]−1∇θf(θ0)
共轭梯度
由于梯度下降法会受到病态的海森矩阵的影响,导致收敛速度非常慢,因此采用共轭梯度下降,每次迭代的方向与想以此的方向共轭,则可以拜托这种病态的影响。
BFGS
该算法由牛顿法的一些优点,但没有其计算逆矩阵的负担。
优化策略和元算法
批标准化
他不是一个优化算法,而是一个自适应的重参数化方法,试图解决训练非常深的模型的困难。
对于非常深的神经网络,每一轮迭代时由于我们同时使用了同时更新所有参数的方式,可能会造成意想不到的情况。
例如对于神经网络
f ( x ) = ω 4 ω 3 ω 2 ω 1 x f(x) = \omega_4\omega_3\omega_2\omega_1x f(x)=ω4ω3ω2ω1x
我们进行一步更新得到的新值是
f ( x ) = ( ω 4 − ϵ 4 ) ( ω 3 − ϵ 3 ) ( ω 2 − ϵ 2 ) ( ω 1 − ϵ 1 ) x f(x) = (\omega_4 - \epsilon_4)(\omega_3 - \epsilon_3)(\omega_2 - \epsilon_2)(\omega_1 - \epsilon_1)x f(x)=(ω4−ϵ4)(ω3−ϵ3)(ω2−ϵ2)(ω1−ϵ1)x
当某几项的系数较大时,很可能会出现梯度爆炸的问题。尤其当网络层数更深时尤为严重。
因此,批标准化提供李毅中几乎可以重参数化所有深度网络的优雅方法,显著见笑了多层之间协调更新的问题。
他可以应用在网络的任何输入层或隐藏层,设 H H H是需要标准化的某层的小批量激活函数,排布为设计矩阵,每个样本的激活出现在矩阵的每一行中。为了标准化 H H H,我们将其替换为 H ′ = H − μ σ H'=\frac{H-\mu}\sigma H′=σH−μ,其中 μ = 1 m ∑ i H i , : \mu = \frac1m\sum_iH_{i,:} μ=m1∑iHi,:, σ = δ + 1 m ∑ i ( H − μ ) i 2 \sigma=\sqrt{\delta+\frac1m\sum_i(H-\mu)^2_i} σ=δ+m1∑i(H−μ)i2, δ \delta δ是一个很小的正值,强制避免遇到梯度为零时产生的一些未定义的问题。
坐标下降
将优化问题分成几部分,每次只优化一个维度或几个维度。
Polyak平均
每次迭代时,会找到其所经过的点的平均。使用这种方法具有较强的收敛保证。
更多推荐

 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)