
强化学习复现笔记(2)策略迭代
上一节的压缩映射在实际迭代时可以分成两种方法,分别称作值迭代和策略迭代。本文用走迷宫的例子(将1维迷宫扩展到2维)讲这两种迭代。对应第一节参考链接[2]的前4章。
摘要: 上一节的压缩映射在实际迭代时可以分成两种方法,分别称作值迭代和策略迭代。本文用走迷宫的例子(将1维迷宫扩展到2维)讲这两种迭代。对应第一节参考链接[2]的前4章。
拆分压缩映射
上一节的压缩映射 v=f(v)v=f(v)v=f(v),展开写就是
v(s)=maxπ∑aπ(a∣s)q(s,a)=maxaq(s,a)=maxa[r(s,a)+γv(s′)]=max[r(s,L)+γv(sL),r(s,R)+γv(sR)]\begin{aligned} v(s) =& \max_\pi\sum_a\pi(a|s)q(s,a) \\ =& \max_a q(s,a) \\ =& \max_a[r(s,a)+\gamma v(s')] \\ =& \max[r(s,L)+\gamma v(s_L), r(s,R)+\gamma v(s_R)] \end{aligned}v(s)====πmaxa∑π(a∣s)q(s,a)amaxq(s,a)amax[r(s,a)+γv(s′)]max[r(s,L)+γv(sL),r(s,R)+γv(sR)]
中实际上每次迭代都隐含了两步,这两步按执行的先后顺序分为值迭代和策略迭代,之前例子是值迭代,因为过于简单看不出区别(一步迭代就找到了最优策略),这次换个复杂的例子。这个式子中的 v(sL)v(s_L)v(sL) 和 v(sR)v(s_R)v(sR) 分别表示当前状态左右两侧状态的价值函数,与策略有关,但策略又与状态价值函数有关,所以按照先更新价值函数还是先更新策略的不同分为两种迭代方法,值迭代和策略迭代。
值迭代 指先找出使 q(s,a)q(s,a)q(s,a) 最大时的 π\piπ,再迭代一步 v=f(v)v=f(v)v=f(v) 称作值迭代。走迷宫时,q(s,a)q(s,a)q(s,a) 建立成一个Q表,每次迭代中,找出表中Q值最大的动作作为 f(v)f(v)f(v),然后求 v=f(v)v=f(v)v=f(v)。
策略迭代 与值迭代相反,先迭代一步 v=f(v)v=f(v)v=f(v),再找出使 q(s,a)q(s,a)q(s,a) 最大时的 π\piπ,称作策略迭代。
这里有个问题,使 q(s,a)q(s,a)q(s,a) 最大时的 π\piπ 应该是个定值,那么如果最优策略 π\piπ 是个随机变量,是不是就迭代不到最优策略?
走迷宫的例子
每个格子处有右上左下和不动5种状态,一开始的策略是每个状态都保持不动。策略编号0~5分别表示不动和右上左下。下图的迷宫中有一个终点和多个陷阱,回合奖励分别为111和−10-10−10。目标为从左上角出发走到终点。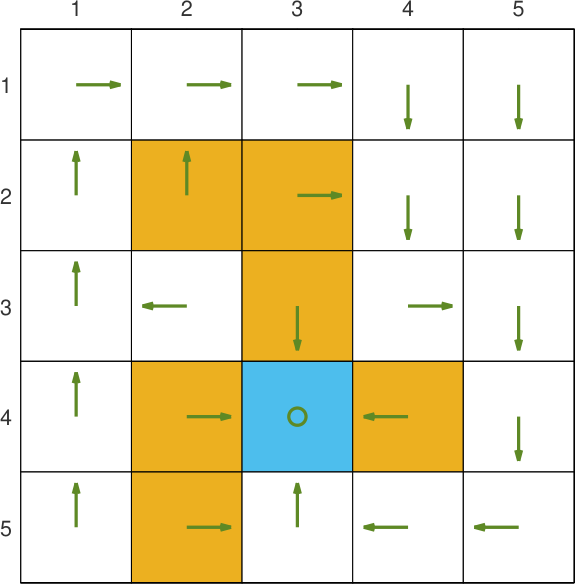
策略迭代
收敛后每个格子的状态价值函数如下图所示。
收敛后每个格子的策略如下图所示。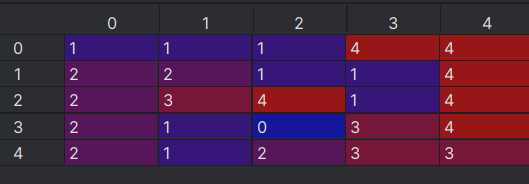
值迭代
附代码
策略迭代
import numpy as np
strategy = np.zeros([5, 5], dtype=int)
gamma = 0.8
MAZE_TRAP = [(1, 1), (1, 2), (2, 2), (3, 1), (3, 3), (4, 1)] # 陷阱
MAZE_TERM = (3, 2) # 终点
# 找出一个数组中的最大值索引,如果有多个最大值,就从中随机取一个
def Argmax_Rand(x: list) -> int:
bestv = -1e12
samevaluei = np.zeros(len(x), dtype=int)
samecnt = 0
for n in range(len(x)):
if x[n] < bestv:
continue
elif x[n] > bestv:
bestv = x[n]
samecnt = 0
samevaluei[samecnt] = n
samecnt += 1
return samevaluei[np.random.randint(samecnt)]
# 返回与一个网格`grid`相邻的第`adjacent`处方位的网格
def Find_Adjacent(grid: tuple, adjacent: int) -> tuple:
ans = list(grid)
if adjacent == 1:
ans[1] += 1
elif adjacent == 2:
ans[0] -= 1
elif adjacent == 3:
ans[1] -= 1
elif adjacent == 4:
ans[0] += 1
ans[0] = 0 if ans[0] < 0 else ans[0]
ans[0] = 4 if ans[0] > 4 else ans[0]
ans[1] = 0 if ans[1] < 0 else ans[1]
ans[1] = 4 if ans[1] > 4 else ans[1]
return tuple(ans)
# 迭代函数
def fx(x):
y = np.zeros([5, 5])
for m in range(5): # 行
for n in range(5): # 列
adjacent = Find_Adjacent((m, n), strategy[m, n])
actionValue = gamma * x[adjacent]
if adjacent in MAZE_TRAP:
actionValue += -10
elif adjacent == MAZE_TERM:
actionValue += 1
y[m, n] = actionValue
return y
# 对每个格子进行策略改善
# grid: 当前格子
# value: 当前策略下的价值函数矩阵
# return: 当前格子的新策略
def Policy_Imporvement(grid: tuple, value):
actionValues = []
for m in range(5): # 5个策略
adjacent = Find_Adjacent(grid, m)
actionValue = gamma * value[adjacent]
if adjacent in MAZE_TRAP:
actionValue += -10
elif adjacent == MAZE_TERM:
actionValue += 1
actionValues.append(actionValue)
return Argmax_Rand(actionValues)
# 主函数
vold = np.zeros([5, 5])
cntPolicyIter = 0
cntValueIters = []
while 1:
# 策略评估(policy evaluation, PE)
cntValueIter = 0
while 1:
vnew = fx(vold)
err = sum(sum(vnew - vold))**2
if err < 1e-6: # 状态价值函数收敛时退出
break
vold = vnew
cntValueIter += 1 # 策略评估的迭代步数
pass
# 策略改善(policy improvement, PI)
strategyOld = strategy.copy()
for m in range(5): # 行
for n in range(5): # 列
strategy[m, n] = Policy_Imporvement((m, n), vnew) # 更新策略
err = sum(sum(strategyOld - strategy))**2
if err < 1e-6: # 策略收敛时退出
break
cntPolicyIter += 1
cntValueIters.append(cntValueIter)
print(cntPolicyIter)
print(cntValueIters)
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)