
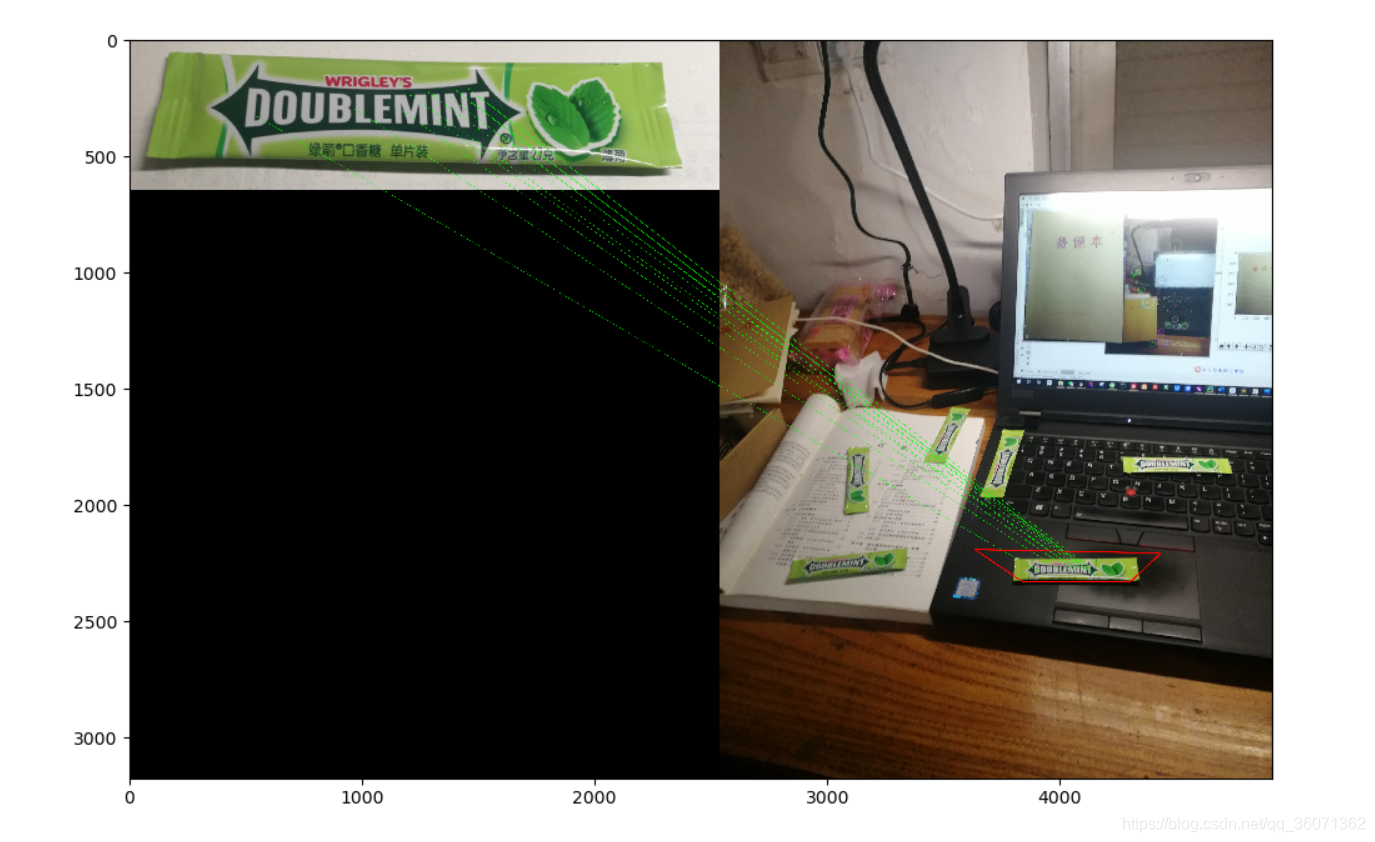
Python opencv学习-16 SIFT+单应性矩阵+特征匹配(Flann)+目标检测
# 注:sift必须在3.4.2+下运行,后面的有专利import numpy as npimport cv2from matplotlib import pyplot as pltMIN_MATCH_COUNT = 10img1 = cv2.imread('image/small3.jpg', 1)img2 = cv2.imread('image/big2.jpg', 1)exx = 0.8ex
·
# 注:sift必须在3.4.2+下运行,后面的有专利
import numpy as np
import cv2
from matplotlib import pyplot as plt
MIN_MATCH_COUNT = 10
img1 = cv2.imread('image/small3.jpg', 1)
img2 = cv2.imread('image/big2.jpg', 1)
exx = 0.8
exy = 0.8
img1 = cv2.resize(img1, dsize=None, fx=exx, fy=exy)
img2 = cv2.resize(img2, dsize=None, fx=exx, fy=exy)
'''img1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
img2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)'''
# 使用SIFT检测角点,创建角点检测器
sift = cv2.xfeatures2d.SIFT_create()
# 获取关键点和描述符
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
print(type(kp1[1]))
print(des1)
# kp是一个关键点列表
# des是一个numpy数组,其大小是关键点数目乘以128,描述符,描述关键点的位置,尺度,向量等信息
# kp = sift.detect(gray, None)
# kp, des = sift.compute(gray, kp)
# 在图中显示特征点
'''img_small_sift = cv2.drawKeypoints(img1, kp1, outImage=np.array([]), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
img_big_sift = cv2.drawKeypoints(img2, kp2, outImage=np.array([]), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow("img1", img_small_sift)
cv2.imshow("img2", img_big_sift)'''
# 定义FLANN匹配器------KD树,具体原理尚不清楚,index_params中的algorithm为0或1
index_params = dict(algorithm=1, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
# 使用KNN算法匹配,FLANN里边就包含的KNN、KD树还有其他的最近邻算法
matches = flann.knnMatch(des1, des2, k=2)
# print(matches)
# 去除错误匹配
good = []
for m, n in matches: #m为第一邻近,n为第二邻近,两者距离满足以下关系才认为是正确匹配
if m.distance <= 0.7 * n.distance:
good.append(m)
# good保存的是正确的匹配
# 单应性
if len(good) > MIN_MATCH_COUNT:
# 改变数组的表现形式,不改变数据内容,数据内容是每个关键点的坐标位置
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
# findHomography 函数是计算变换矩阵
# 参数cv2.RANSAC是使用RANSAC算法寻找一个最佳单应性矩阵H,即返回值M
# 返回值:M 为变换矩阵,mask是掩模
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
# ravel方法将数据降维处理,最后并转换成列表格式
matchesMask = mask.ravel().tolist()
# 获取img1的图像尺寸
h, w, dim = img1.shape
# pts是图像img1的四个顶点
pts = np.float32([[0, 0], [0, h - 1], [w - 1, h - 1], [w - 1, 0]]).reshape(-1, 1, 2)
# 计算变换后的四个顶点坐标位置
dst = cv2.perspectiveTransform(pts, M)
# 根据四个顶点坐标位置在img2图像画出变换后的边框
img2 = cv2.polylines(img2, [np.int32(dst)], True, (0, 0, 255), 3, cv2.LINE_AA)
else:
print("Not enough matches are found - %d/%d", (len(good), MIN_MATCH_COUNT))
matchesMask = None
# 显示匹配结果
draw_params = dict(matchColor=(0, 255, 0), # draw matches in green color
singlePointColor=None,
matchesMask=matchesMask, # draw only inliers
flags=2)
img3 = cv2.drawMatches(img1, kp1, img2, kp2, good, None, **draw_params)
# 将画面显示
plt.figure(figsize=(5, 5))
plt.imshow(cv2.cvtColor(img3, cv2.COLOR_BGR2RGB))
plt.show()
参考https://www.cnblogs.com/zhj-Szu/p/12311082.html
更多推荐
 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)