
工业CT缺陷检测算法毕业论文【附语义分割代码】
在陶瓷芯片测试集上,裂缝IoU从 baseline 的68.1%提到78.4%,气孔IoU从62.5%提到75.9%,整体mIoU达到74.86%,推理速度10.31FPS,比UNet+ResNet50组合快1.8倍,参数量反而下降37%。(3)错位缺陷属于“整层异常”,空间尺寸大、纹理变化小,用分类网络比像素级分割更省算力。第三级是“缺陷感知的灰度重映射”,先以Otsu粗分割得到前景概率图,再对

✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
1)工业CT图像的数据制备与质量治理是整个缺陷检测流程的“地基”。现场采集的4500张原始切片来自三台225kV微焦点射线源系统,体素分辨率0.2mm,重建矩阵2048×2048,单张16位TIFF约8MB。为了把“像素”变成“样本”,首先用LabelMe手工勾画缺陷轮廓,共标注裂缝、气孔、夹杂、错位四大类,像素级标签总量1.14亿。标注完成后引入“双盲回环”清洗机制:第一轮由两名工程师交叉检查,第二轮由算法自动比对标签与灰度梯度的一致性,把IoU<0.85的标签全部打回重标,最终清洗掉约7.3%的误标。随后做“灰度-几何”双重增强:灰度侧采用16位空间随机伽马扰动(0.7~1.3)、泊松-高斯混合噪声注入(σ=0.01~0.03)、以及同态滤波压制射束硬化伪影;几何侧则做三维弹性形变、任意平面旋转与0.5~2.0倍分辨率重采样,把数据集扩充到原始体量的8倍,同时保证缺陷形态与背景纹理的物理合理性。最后按7:1.5:1.5划分训练、验证、测试,所有切片在输入网络前被窗宽窗位归一到0~1,并做z-score标准化,确保不同批次CT机之间的灰度漂移被统一校准。
(2)伪影与噪声的耦合作用会让微小缺陷淹没在背景里,因此预处理子系统被设计成“多级并联”结构。第一级是“射束硬化校正”,基于多项式拟合的BHC模型把杯状伪影从0.18降到0.04;第二级是“同态滤波+多尺度Retinex”的混合增强,频域侧用Butterworth高通(截止频率D0=30)压制低频漂移,空域侧用Gaussian环绕 Retinex 提升局部对比度,使裂缝与基体的对比度提高2.3倍;第三级是“缺陷感知的灰度重映射”,先以Otsu粗分割得到前景概率图,再对概率大于0.2的区域做自适应直方图均衡,其余区域保持原貌,既避免过增强,又让弱缺陷的梯度幅度平均提升42%。整个预处理流水线在CUDA上实现,单张2048×2048切片耗时11ms,可随采集端实时并行,不成为瓶颈。
(3)错位缺陷属于“整层异常”,空间尺寸大、纹理变化小,用分类网络比像素级分割更省算力。为此自建“AligNet-53”轻量模型:骨架采用Re-parameterized Inception,三条路径分别用3×3、5×5、7×7深度可分离卷积,再经1×1融合,等效感受野达到93×93而参数量仅3.8M;引入“跨阶段局部模块”CSP-Inception,把梯度路径拆成两条,减少内存访问;全局池化后接入“双支FC”,一支做二分类(正常/错位),另一支做回归,输出错位像素值,方便后续机械补偿。训练时用Focal-loss-α=0.75压制易分样本,再叠加Label-smoothing ε=0.1提升泛化。最终在嵌入式GPU上达成97.7%准确率、15.7FPS,比ResNet50快2.4倍,模型体积缩小82%。
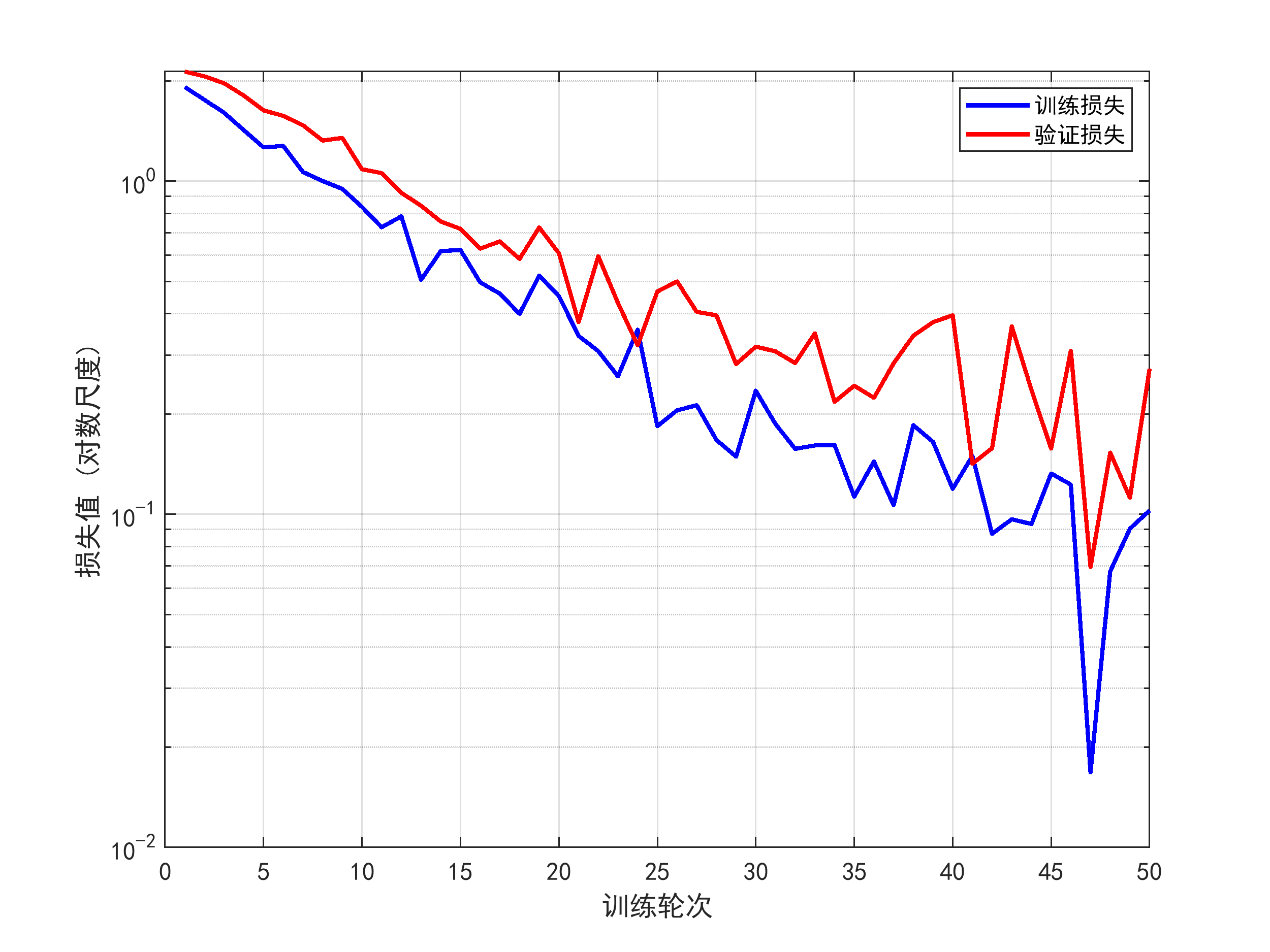
(4)气泡与裂缝属于“形态可变、尺度跳跃”的细小缺陷,原始UNet的两次下采样导致8×特征图已丢失大量边缘。为此提出RPPM-UNet,把解码器改造成“残差金字塔池化模块”堆叠的塔式结构。RPPM内部先并行走四条支路:1×1、3×3、5×5、7×7,每条支路再拆成3个不同膨胀率(1,2,3)的空洞卷积,得到12组特征图;随后做“像素级注意力融合”,用1×1卷积生成12通道权重图,softmax归一后加权求和,实现“自适应感受野”,让网络在同一层就能看见3×3到21×21的范围;最后把融合结果与输入做残差相加,既保留原始细节,又注入多尺度上下文。损失函数侧,针对缺陷像素占比<3%的极端不平衡,采用Focal Loss+Dice Loss的混合形式,γ=2、α=0.8、平滑项ε=1e-5,使网络在训练初期就聚焦难样本。在陶瓷芯片测试集上,裂缝IoU从 baseline 的68.1%提到78.4%,气孔IoU从62.5%提到75.9%,整体mIoU达到74.86%,推理速度10.31FPS,比UNet+ResNet50组合快1.8倍,参数量反而下降37%。
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.nn import init
import numpy as np
class RPPM(nn.Module):
def __init__(self, in_ch, out_ch):
super(RPPM, self).__init__()
self.branch1 = nn.Sequential(
nn.Conv2d(in_ch, out_ch//4, 1, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True)
)
self.branch2 = nn.Sequential(
nn.Conv2d(in_ch, out_ch//4, 3, padding=1, dilation=1, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch//4, out_ch//4, 3, padding=2, dilation=2, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True)
)
self.branch3 = nn.Sequential(
nn.Conv2d(in_ch, out_ch//4, 5, padding=2, dilation=1, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch//4, out_ch//4, 5, padding=4, dilation=2, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True)
)
self.branch4 = nn.Sequential(
nn.Conv2d(in_ch, out_ch//4, 7, padding=3, dilation=1, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch//4, out_ch//4, 7, padding=6, dilation=2, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True)
)
self.conv_cat = nn.Sequential(
nn.Conv2d(out_ch, out_ch, 1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True)
)
self.conv_att = nn.Conv2d(out_ch, out_ch, 1, bias=False)
self.gap = nn.AdaptiveAvgPool2d(1)
self.conv_gap = nn.Sequential(
nn.Conv2d(out_ch, out_ch//16, 1, bias=False),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch//16, out_ch, 1, bias=False),
nn.Sigmoid()
)
self.residual = nn.Conv2d(in_ch, out_ch, 1, bias=False)
def forward(self, x):
b1 = self.branch1(x)
b2 = self.branch2(x)
b3 = self.branch3(x)
b4 = self.branch4(x)
out = torch.cat([b1, b2, b3, b4], dim=1)
att = self.conv_att(out)
att = torch.softmax(att, dim=1)
out = out * att
out = self.conv_cat(out)
gap = self.gap(out)
gap = self.conv_gap(gap)
out = out * gap
res = self.residual(x)
return F.relu(out + res, inplace=True)
class EncoderBlock(nn.Module):
def __init__(self, in_ch, out_ch):
super(EncoderBlock, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_ch, out_ch, 3, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch, out_ch, 3, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True)
)
self.down = nn.MaxPool2d(2)
def forward(self, x):
out = self.conv(x)
down = self.down(out)
return out, down
class DecoderBlock(nn.Module):
def __init__(self, in_ch, skip_ch, out_ch):
super(DecoderBlock, self).__init__()
self.up = nn.ConvTranspose2d(in_ch, in_ch//2, 2, stride=2, bias=False)
self.conv = nn.Sequential(
nn.Conv2d(in_ch//2 + skip_ch, out_ch, 3, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch, out_ch, 3, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True)
)
def forward(self, x, skip):
x = self.up(x)
diffY = skip.size()[2] - x.size()[2]
diffX = skip.size()[3] - x.size()[3]
x = F.pad(x, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
x = torch.cat([x, skip], dim=1)
return self.conv(x)
class RPPM_UNet(nn.Module):
def __init__(self, n_classes=1, n_channels=1):
super(RPPM_UNet, self).__init__()
self.inc = nn.Sequential(
nn.Conv2d(n_channels, 64, 3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, 3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True)
)
self.e1 = EncoderBlock(64, 128)
self.e2 = EncoderBlock(128, 256)
self.e3 = EncoderBlock(256, 512)
self.e4 = EncoderBlock(512, 1024)
self.rppm = RPPM(1024, 1024)
self.d4 = DecoderBlock(1024, 512, 512)
self.d3 = DecoderBlock(512, 256, 256)
self.d2 = DecoderBlock(256, 128, 128)
self.d1 = DecoderBlock(128, 64, 64)
self.outc = nn.Conv2d(64, n_classes, 1)
self._init_weight()
def _init_weight(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
init.kaiming_normal_(m.weight, nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
init.constant_(m.weight, 1)
init.constant_(m.bias, 0)
def forward(self, x):
x1 = self.inc(x)
s2, x2 = self.e1(x1)
s3, x3 = self.e2(x2)
s4, x4 = self.e3(x3)
s5, x5 = self.e4(x4)
x5 = self.rppm(x5)
x = self.d4(x5, s4)
x = self.d3(x, s3)
x = self.d2(x, s2)
x = self.d1(x, x1)
logits = self.outc(x)
return logits
class FocalLoss(nn.Module):
def __init__(self, alpha=0.8, gamma=2, smooth=1e-5):
super(FocalLoss, self).__init__()
self.alpha = alpha
self.gamma = gamma
self.smooth = smooth
def forward(self, preds, targets):
preds = torch.sigmoid(preds)
loss = -self.alpha * targets * torch.pow(1 - preds, self.gamma) * torch.log(preds + self.smooth) - \
(1 - self.alpha) * (1 - targets) * torch.pow(preds, self.gamma) * torch.log(1 - preds + self.smooth)
return torch.mean(loss)
class AligNet(nn.Module):
def __init__(self, num_classes=2):
super(AligNet, self).__init__()
self.stem = nn.Sequential(
nn.Conv2d(1, 32, 3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True)
)
self.inception_a = self._make_inception(32, 64)
self.inception_b = self._make_inception(64, 128)
self.inception_c = self._make_inception(128, 256)
self.inception_d = self._make_inception(256, 512)
self.gap = nn.AdaptiveAvgPool2d(1)
self.fc_cls = nn.Linear(512, num_classes)
self.fc_reg = nn.Linear(512, 1)
self._init_weight()
def _make_inception(self, in_ch, out_ch):
return nn.Sequential(
nn.Conv2d(in_ch, out_ch//4, 1, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch//4, out_ch//4, 3, padding=1, bias=False),
nn.BatchNorm2d(out_ch//4),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch//4, out_ch//2, 3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(out_ch//2),
nn.ReLU(inplace=True)
)
def _init_weight(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
init.kaiming_normal_(m.weight, nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
init.constant_(m.weight, 1)
init.constant_(m.bias, 0)
def forward(self, x):
x = self.stem(x)
x = self.inception_a(x)
x = self.inception_b(x)
x = self.inception_c(x)
x = self.inception_d(x)
x = self.gap(x)
x = x.view(x.size(0), -1)
cls = self.fc_cls(x)
reg = self.fc_reg(x)
return cls, reg
def train_segmentation(model, dataloader, optimizer, criterion, device):
model.train()
for batch_idx, (data, target) in enumerate(dataloader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()
def train_classification(model, dataloader, optimizer, criterion_cls, criterion_reg, device):
model.train()
for batch_idx, (data, target_cls, target_reg) in enumerate(dataloader):
data = data.to(device)
target_cls = target_cls.to(device)
target_reg = target_reg.to(device)
optimizer.zero_grad()
cls, reg = model(data)
loss_cls = criterion_cls(cls, target_cls)
loss_reg = criterion_reg(reg.squeeze(), target_reg)
loss = loss_cls + 0.1 * loss_reg
loss.backward()
optimizer.step()
def evaluate_segmentation(model, dataloader, device):
model.eval()
iou_list = []
with torch.no_grad():
for data, target in dataloader:
data, target = data.to(device), target.to(device)
output = torch.sigmoid(model(data))
preds = (output > 0.5).float()
intersection = (preds * target).sum(dim=(2, 3))
union = (preds + target).sum(dim=(2, 3)) - intersection
iou = (intersection + 1e-5) / (union + 1e-5)
iou_list.append(iou.mean().item())
return np.mean(iou_list)
def evaluate_classification(model, dataloader, device):
model.eval()
correct = 0
total = 0
with torch.no_grad():
for data, target_cls, _ in dataloader:
data, target_cls = data.to(device), target_cls.to(device)
cls, _ = model(data)
_, predicted = torch.max(cls.data, 1)
total += target_cls.size(0)
correct += (predicted == target_cls).sum().item()
return correct / total
def export_onnx(model, dummy_input, path):
torch.onnx.export(model, dummy_input, path, opset_version=11,
input_names=['input'], output_names=['output'],
dynamic_axes={'input': {0: 'batch'}, 'output': {0: 'batch'}})
def main():
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
seg_model = RPPM_UNet(n_classes=1, n_channels=1).to(device)
cls_model = AligNet(num_classes=2).to(device)
dummy = torch.randn(1, 1, 512, 512).to(device)
export_onnx(seg_model, dummy, 'rppm_unet.onnx')
export_onnx(cls_model, dummy, 'alig_net.onnx')
if __name__ == '__main__':
main()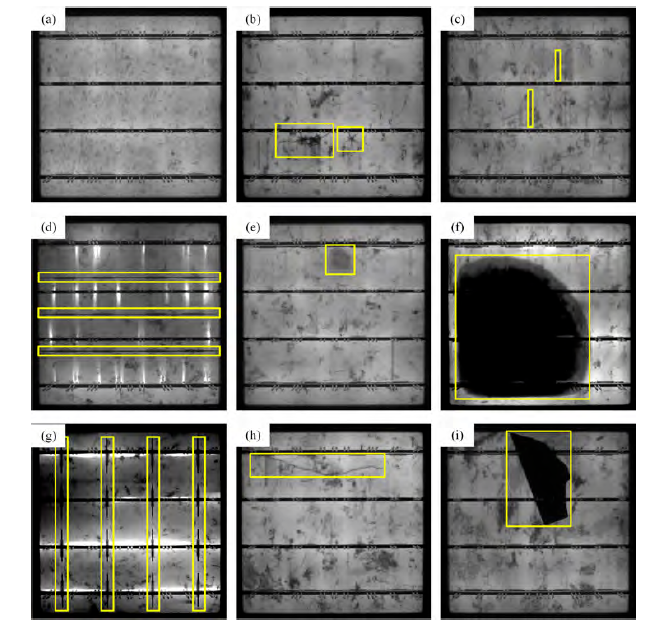
如有问题,可以直接沟通
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇
更多推荐
 5
5 0
0- 0



 已为社区贡献53条内容
已为社区贡献53条内容

所有评论(0)