
数据定义:数字化控制系统技术分析-1
通信中间件或域控中间件采用了专用的网络(以太网、TSN、TTE等),当代网络技术的发展方向企图使用一种标准(物理接口或协议)来统一其它物理接口或协议实现单平台直至多平台群协同也是一个发展误区,网络技术的终极目标应该是将通信中间件或域控中间件的通信管理能力覆盖到各类网络、总线直至自定义协议,通过库工厂的形式来包含/兼容各类网络、总线、自定义协议并提供统一的接口给任务功能模型。以上述示范看,它是一个最
引言
复杂系统的数字化控制是多系统、多模态、多形式的控制,为此,选择“中央集中式计算架构”好像是一个特别有优越感的体现,这个优越感体现在:
1、你看我们的技术多牛;
2、你看我们设计系统是多么复杂和精密;
3、你看我们有更复杂技术解决复杂问题。
而事实上是这样的?
“中央集中式计算架构”应用于低计算量的系统似乎是可行的。
因技术进步,系统的执行器、控制器、传感器及其它子系统,所应对的执行均需要“计算功能”,为此,采用“中央集中式计算架构”的必须:
1、高算力计算系统;
2、高复杂高成本的复杂设计;
3、高环控技术问题解决;
4、冗余的要求低成本和高可靠性。
复杂系统是不计成本的解决强需求应用场景还是强调成本和收益均衡的应用场景,有巨大的差别。
为此,合理且均衡的解决方案是分布式。
一、数字化控制系统的本质典型特征
数字化控制系统最典型特征是由(1)物理平台(执行器、传感器)、(2)信息平台(数据转换、逻辑处理、功能计算)构成。由此形成“感知-决策-执行”的周期性循环控制系统。
既然形成一个周期性循环特征的控制系统,我们一定会关注和建立一条基于内部网络通信的机制,以及建立一个基于数据运营周期性管理机制。
1、具有通信接口的智能感知:传感器自身实现模数转换形成二进制原始数据,并将二进制原始数据转换到具有“工程含义”的信息数据,经过各类网络或总线(以太网、各类总线、串口等)数据交换的接口,少数IO转换则采用板卡等方式以自定义协议提供数据交换接口。这些数据交换可以统一为广义通信接口的一个机制;
2、具有周期性步进触发特性:无论是传感器本身还是决策算法,都是按固定时间单步推进,每个步进完成一次决策计算过程。步进时间取决于算力资源硬件性能,当代数字化控制系统的实时计算部分一般为1毫秒、5毫秒、10毫秒、20毫秒,非实时计算部分一般为50毫秒、100毫秒、200毫秒,这个实时性和周期性循环控制是基于数据管控机制实现。
在闭环控制过程中,控制系统至少执行两项任务:
1、一是对所有物理接口的管理,形成内部决策算法的功能模块所需要的特定结构化数据和组成控制部分的特定结构化数据;
2、一是决策算法本身的功能实现。
以一个最小化单机控制为例:
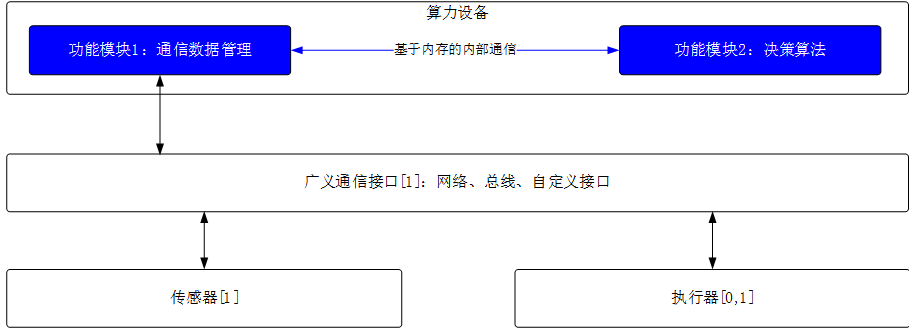
图1 最小化单机控制系统
以上述示范看,它是一个最小单机控制系统,而其硬件上的传感器、执行器和算力设备内部的功能模块之间均是体现出架构是分布式系统。通信数据管理、决策算法均可归于功能计算部分,其计算过程本质也是分布式计算。
当代“中央集中式计算架构”是以算力设备的视角来定义数字化控制系统,将所有传感器、执行器的数据通过分布式网络传递到一台算力设备中进行计算和控制,其本质是数据通过网络得到“集中”,而作为中央集中计算的处理机如航空电子系统的综合核心处理机(ICP)、汽车电子电气系统中的中央超算计算机等,其内部多核架构的功能模块协同采用“高内聚、松耦合”的方式,通过计算机内存来实现数据的交互,其本质是通过内部网络通信构成了一个分布式系统:
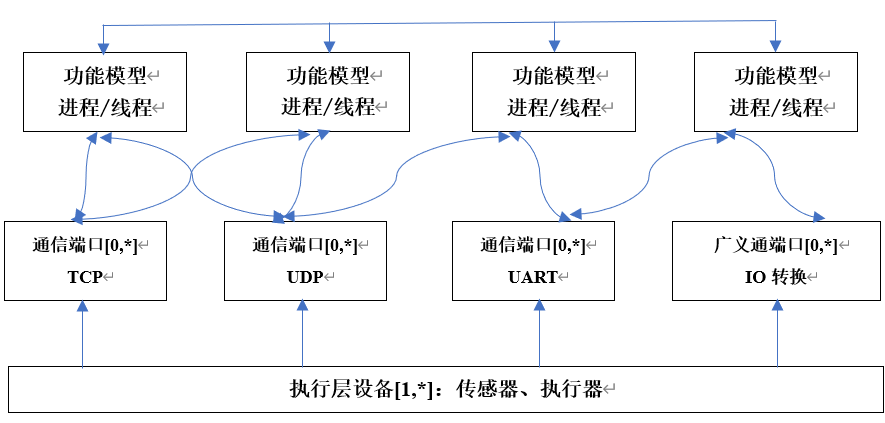
图2 集中式计算的本质是功能模型分布式系统
相对于外部物理网络通信来说,内部网络具有比外部网络更好的处理优势:
1、能够提供更大带宽和更多的存储:外部网络由硬件完成,其片上存储资源有限,而算力设备内部很容易达到几十个G的存储资源,易于实现数据排队和管控;
2、能更容易实现数据的一致性:算力设备内部通过线程锁或进程锁等技术,很容易保证各个功能模块的数据与数据副本的一致性;
3、能更容易实现错误检测与重构:算力设备内部内存对所有功能模块可以实现透明化,通过相应的软件技术容易实现故障检测、故障隔离,甚至通过软件功能模块的强制重启等技术来实现功能重构。
当代系统设计为简化应用层软件系统的复杂性,发展出“通信中间件”如DDS/Fast 、DDS、MQTT、SIME/IP等,这些通信中间件在算力设备内部以共享内存或消息队列方式实现了内部网络数据交互,但外部网络节点往往只能采用特定的网络如TCP/UDP来实现节点间的数据交互,以“服务”的形式为软件功能模块提供统一的数据交互接口。
在通信中间件的基础上,一些厂商将一些通用的智能算法、数据处理算法等集成在一起构成“中心化”的域控中间件如ROS、ROS2、AUTOSAR、CyberRT等,这些中间件为保证数据一致性、时间确定性、分区容错性等,往往需要节点间数据交叉反复传输,加重了网络本身的负担,导致对带宽的高需求和时间确定性的需求,引发了当代网络技术向时间触发以太网TTE、时间敏感网络TSN等方向发展。
二、异构分布式互连互操作是数字化控制系统的需要
一个复杂系统的物理性电子电气架构是在依托软件、硬件为基础的为了完成具有功能表现形式机制性融合体,它可以从多个角度被分析与定义。
这个复杂系统首先需要是数据链接与传输,系统的信息平台和物理平台是通过网络通信平台(也包括通信中间件、域控中间件等)进行数据链接与传输,这是一个极其重要的节点。通信平台的外部物理接口一般基于以太网、TTE、TSN等实现。如果将接口模型(协议转换)也归于通信平台,则通信中间件外部接口还包括了各类网络、总线、IO转换、自定义物理接口和自定义协议等,内部通信接口则采用了共享内存或消息队列来实现进程间或线程间通信。也就是说,如果将通信过程扩展到算力设备内部,并且将接口模型归于通信平台,即使是最简单的单机集中式计算系统,对于功能模型来说,也是一个异构互连互操作系统:
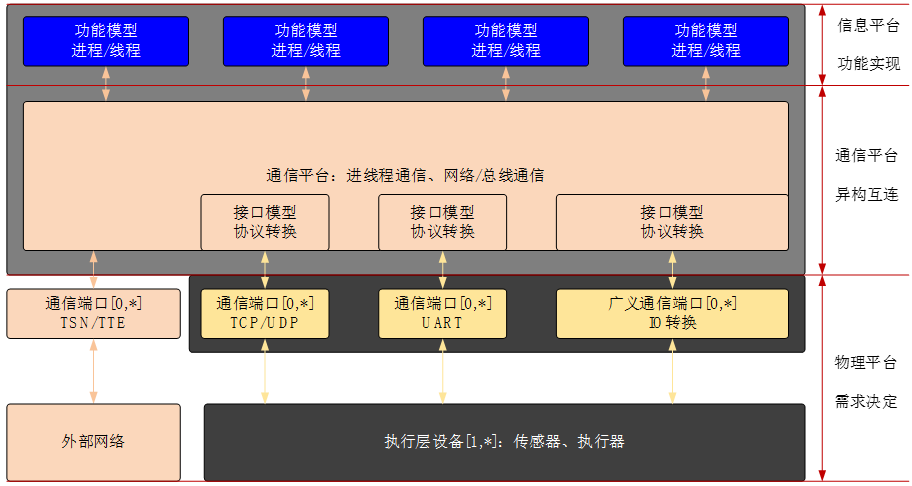
图3 异构互连互操作系统
从微观到宏观的本质一致性:异构互连互操作
当代数字化控制系统的设计路线将单机控制系统当作集中式控制系统看待,将单平台复杂系统的系统架构设计为集中式计算架构形成集中式控制系统看待,仅仅多平台群协同巨系统当作分布式控制系统看待,这本身就是一个误区,只有从更细粒度功能模型的协同视角来看待当代数字化控制系统,才能使单机内部功能模型的协同一直到多平台群协同达到本质统一:异构分布式互连互操作系统。
当代系统设计路线中,作为支撑技术的通信中间件或域控中间件并未将异构物理端口的管理纳入考虑,而是将异构物理端口管理的接口模型设计交给了应用层主体技术开发人员,而主体技术开发人员一般都是由各领域(车、机、舰、星、弹、工业自动化等)相关专业人员,精通业务算法和业务流程(逻辑)处理,但并非通信技术、电子电气技术专业,缺乏对物理平台数据处理的经验。不仅要面对复杂系统甚至巨系统的繁多的异构网络(包括总线和自定义IO转换)底层协议,还需要面对不同算力设备之间的软件模块之间应用层协议,从而出现了大量的ICD交叉沟通协调;数据协同、数据过热、“数据过冷”等难以正确处理造成的大量设计更改;设计更改又造成大量重复性测试工作:
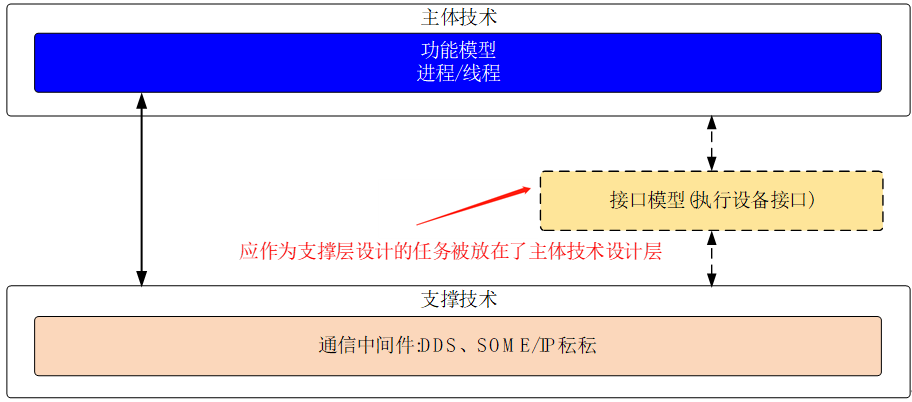
图4 支撑技术覆盖度不足
通信中间件或域控中间件采用了专用的网络(以太网、TSN、TTE等),当代网络技术的发展方向企图使用一种标准(物理接口或协议)来统一其它物理接口或协议实现单平台直至多平台群协同也是一个发展误区,网络技术的终极目标应该是将通信中间件或域控中间件的通信管理能力覆盖到各类网络、总线直至自定义协议,通过库工厂的形式来包含/兼容各类网络、总线、自定义协议并提供统一的接口给任务功能模型。只有这样才能解决当代产品与技术与下一代产品与技术之间的平滑过渡和全兼容协同运行。
除了解决异构物理接口的统一调用接口和数据管理,还需要将当代数字化控制系统软硬件架构实现功能重分配才能真正统一从单机系统一直到群协同巨系统的统一:
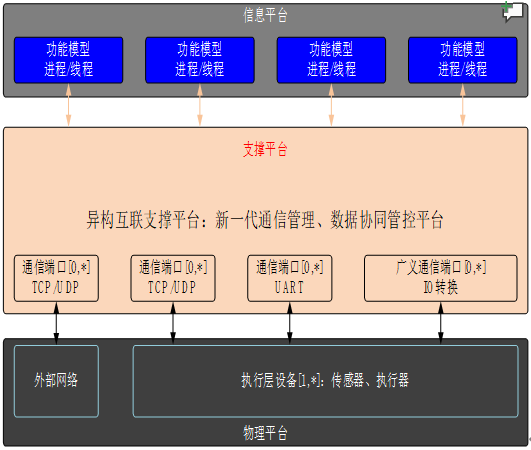
图5 系统功能重分配形成新的统一架构
更多推荐
 28
28 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)