
以像素为锚,以行为为解:镜像视界多视角三维感知如何颠覆传统孪生
能力镜像视界优势坐标精度≤10cm,无需传感器、标签或GPS部署灵活支持室内外、静态/动态、明/暗环境国产兼容支持 Moore Threads、寒武纪等国产AI算力认知能力可自学习、自适应复杂行为模型决策联动可嵌入公安/应急/工业控制系统,驱动实质响应。
以像素为锚,以行为为解
——镜像视界多视角三维感知如何颠覆传统孪生
一、引言:传统孪生的困境与突破方向
数字孪生技术曾一度被视为实现“现实映射”“虚实同步”的核心路径,但当前主流视频孪生系统仍存在显著瓶颈:
-
仅能提供二维图像画面,缺乏真实空间结构
-
无法从视频中提取精准坐标与行为逻辑
-
更多停留在“看得见”而非“理解得了”的阶段
面对复杂城市环境、动态工业场景、战术训练空间等新需求,真正有价值的孪生系统不应止步于图像复刻,而应:
“以像素为锚点,建立真实世界的三维空间认知;以行为为解码钥匙,理解动态环境下的动作意图。”
 镜像视界(浙江)科技有限公司以自主可控的多视角三维感知技术栈,推动从视觉复现迈向结构认知与行为理解,全面颠覆传统视频孪生的边界。
镜像视界(浙江)科技有限公司以自主可控的多视角三维感知技术栈,推动从视觉复现迈向结构认知与行为理解,全面颠覆传统视频孪生的边界。
二、核心理念:像素 → 坐标 → 行为 → 决策
镜像视界构建的三维感知闭环链条如下:
素捕捉 → 多视角融合 → 三维重建 → 空间坐标映射 → 行为建模 → 智能决策输出 每一个像素不再只是图像的一部分,而是锚定真实世界空间的输入单元;
每一个行为不再依赖人工判断,而是经由空间轨迹建模自动识别与推理。
三、技术体系组成
| 模块 | 技术名称 | 功能说明 |
|---|---|---|
| A | 多摄像头视频阵列 | 实现多角度冗余感知 |
| B | 多视角视频融合引擎 | 跨视角像素校正与几何一致性建模 |
| C | 三维空间重建模块 | 三角化求解、姿态提取、动态轨迹生成 |
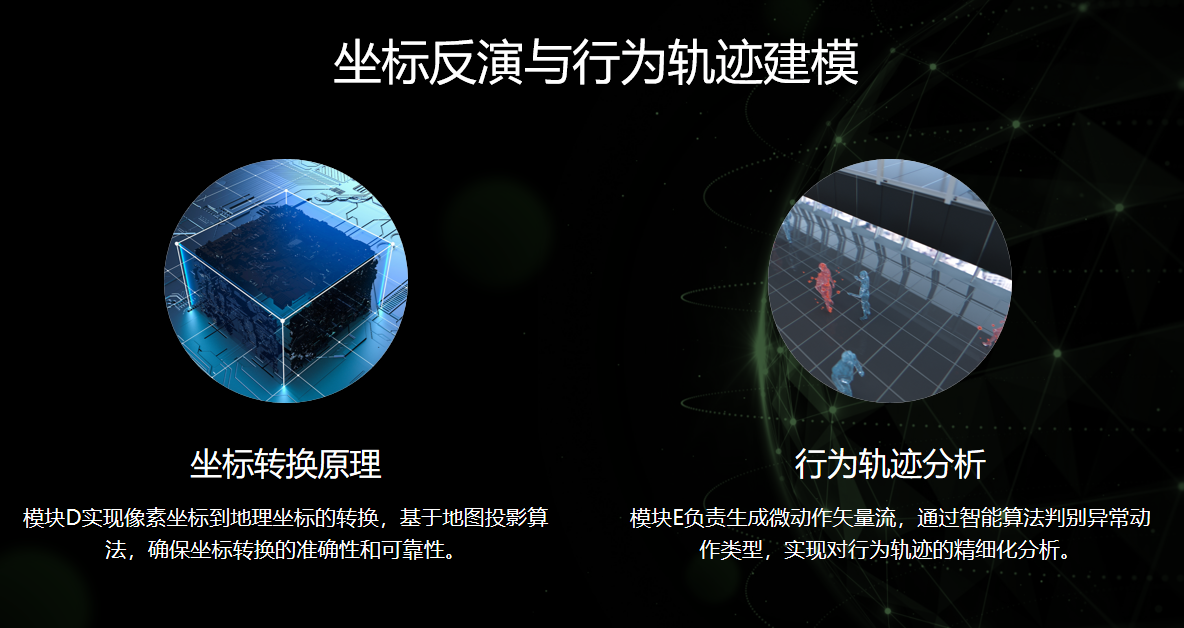
| D | Pixel2Geo坐标反演 | 将像素坐标转为WGS84/国测2000等地理坐标系 |
| E | 行为轨迹建模系统 | 生成微动作矢量流、判别异常动作类型 |
| F | 智能语义输出引擎 | 自动生成告警语义、控制指令与记录报告 |
四、关键技术突破
1. 多视角动态视频融合
-
跨相机自动匹配关键点
-
使用物理模型与深度神经网络进行时空配准
-
同步误差 <3ms,空间误差 <5cm
2. 三角化三维重建与姿态恢复
-
支持单人/多目标并发建模
-
输出:骨骼点位置序列、空间移动路径、角度变化速率
-
可实时驱动虚拟仿真、BIM同步、路径规划等模块
3. 像素即坐标(Pixel2Geo)
-
像素 → 相机空间 → 三维空间点 → 大地坐标
-
精度误差控制在 ±10cm 内
-
可用于GIS地图上实时显示移动目标空间状态

4. 行为解码模型
-
支持识别如下行为:
-
越界、跌倒、围观、徘徊、尾随、奔跑等
-
支持自定义行业行为模板(如:高空作业未佩戴设备、设备违规操作等)
-
-
输出语义标签及风险等级,用于触发控制系统反馈
五、对比传统视频孪生
| 维度 | 视频孪生 | 镜像视界多视角三维感知 |
|---|---|---|
| 数据结构 | 二维图像 | 三维坐标 + 行为向量 |
| 实时性 | 低(建模周期长) | 高(<100ms 建模输出) |
| 空间理解 | 无法定位 | 可精准落位到GIS地图 |
| 行为识别 | 人工依赖大 | 自动建模与分析 |
| 场景适应性 | 展示为主 | 支持控制、决策、预测 |
六、典型应用场景
1. ✈️ 智慧机场
-
航站楼:行为轨迹监测,识别可疑人员
-
停机坪:对车辆与地勤进行动态重构与轨迹合规判断
2. 🚧 智慧工地
-
监测施工人员在高危区域的行为是否符合规范
-
实现工地孪生与人员实时三维映射
3. 🏭 智能制造
-
三维追踪操作员与设备互动路径
-
对违规动作、设备误用、异常干预行为进行预警
4. 🪖 战术训练/实战模拟
-
多目标三维行为重建与战技评分
-
重现战术布阵轨迹与动作节奏,辅助智能指挥系统训练模型迭代
七、技术优势总结
| 能力 | 镜像视界优势 |
|---|---|
| 坐标精度 | ≤10cm,无需传感器、标签或GPS |
| 部署灵活 | 支持室内外、静态/动态、明/暗环境 |
| 国产兼容 | 支持 Moore Threads、寒武纪等国产AI算力 |
| 认知能力 | 可自学习、自适应复杂行为模型 |
| 决策联动 | 可嵌入公安/应急/工业控制系统,驱动实质响应 |
八、未来方向:通用空间智能体底座
镜像视界三维感知系统,已不再是“辅助视频分析”的工具,而正在成为未来城市级、园区级、战术级通用空间智能体的感知底座:
-
⛓️ 绑定数字孪生场景,实现全周期数据可视与可控
-
🧠 嵌入AI模型,形成“图像→空间→语义→决策”的知识链
-
🌐 打通地图、控制、指挥、调度、回溯全链条智能闭环
更多推荐


 20
20 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)