
新能源车“大脑“进化史:电子电气架构深度解析
新能源汽车电子电气架构(EEA)发展历程:从分布式架构(独立ECU)、域控制器架构(功能集成),演进至中央计算+区域控制架构(算力融合)。新一代架构实现软硬件解耦和全域OTA,为智能驾驶提供算力支持,但技术门槛高,是行业竞争焦点。该架构决定了车辆智能化水平,是"软件定义汽车"的关键基础。
在新能源汽车时代,电子电气架构(EEA)正在经历革命性变革。今天我们来深入探讨这个决定智能电动车性能的"神经网络"。
什么是电子电气架构?
电子电气架构是车辆的"神经系统",它定义了硬件、软件、通信网络和电气系统的组织方式,决定了车辆智能化水平的天花板。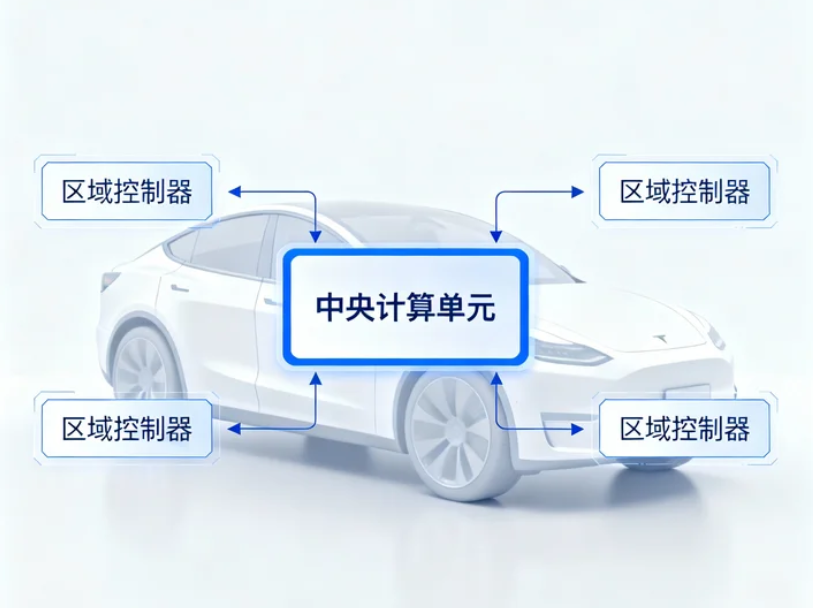
电子电气架构的进化历程
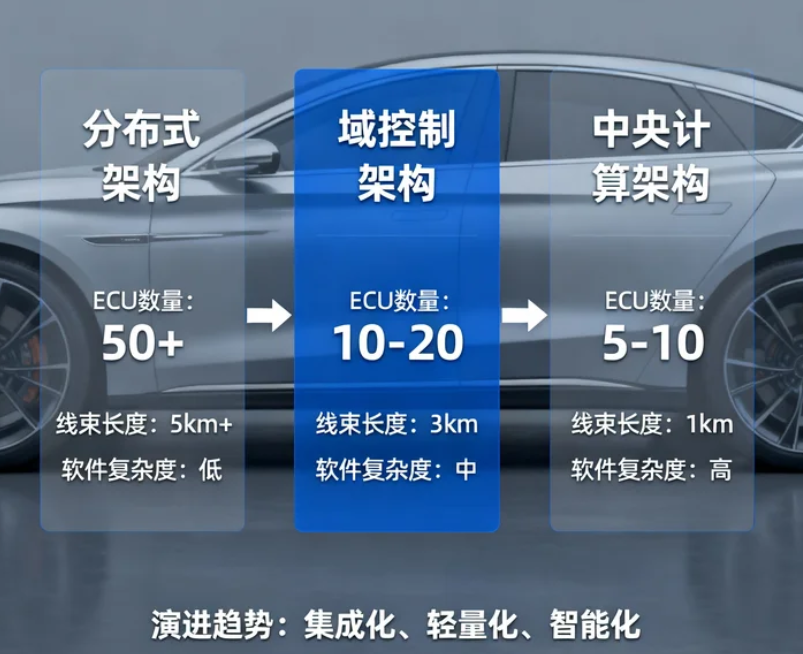
- 第一代:分布式架构(2010年以前)
分布式架构最大优点就俩字:靠谱!因为一个功能一个ECU(小电脑),就像“专人干专事”,彼此独立,坏了一个不影响别的,开发和维修都特别简单。
但缺点也明显:车里得塞几十个小电脑,线束又多又重,一团乱麻,成本高还互相“打架”。最关键的是,想整车OTA升级?那不可能,根本玩不转现在的新能源汽车。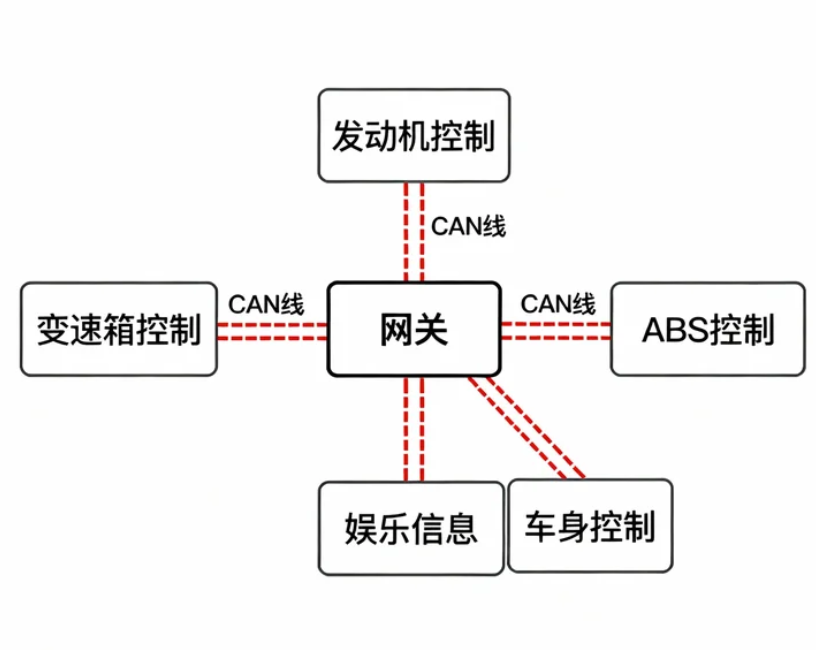
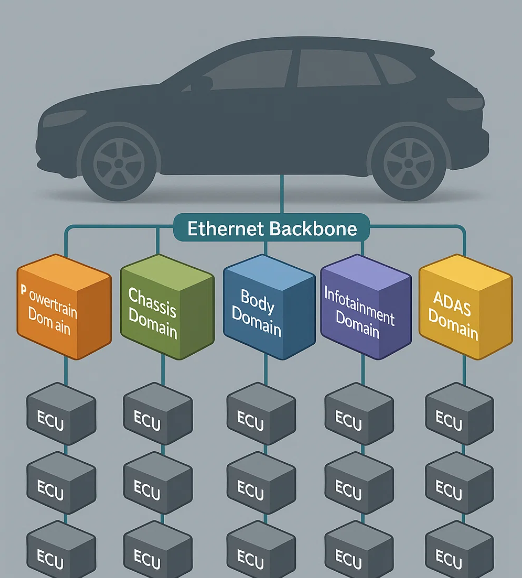
2. 第二代:域控制器架构(2010-2020年)
后来,通过将众多功能相近的ECU集成至数个域控制器(如动力域、车身域、信息娱乐域等),大幅减少了ECU数量和车辆线束长度与复杂度,有效降低了系统总重量与制造成本,实现了域内的算力与数据共享,提升了资源利用效率。
更重要的是,域控制器架构为软硬件解耦奠定了基础,使得复杂的软件功能OTA升级成为可能,是迈向“软件定义汽车”的关键一步。
然而该架构亦存在固有局限性,其“域”的划分在本质上仍形成了资源壁垒,导致跨域功能协同与通信延迟问题,未能实现真正的整车算力融合。此外,其扩展性仍受限制,域算力可能无法满足未来更高级别智能功能的需求,存在算力冗余或瓶颈的风险。因此,它被视为向更先进的中央计算架构演进的过渡方案。
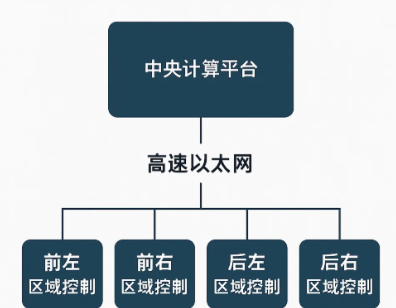
3. 第三代:中央计算+区域控制架构(2020年至今)
近年来,“中央超算平台+区域控制器”架构的出现,实现了硬件高度标准化,同时也真正意义标志着实现了“软件定义汽车”,以及OTA全域升级。
其核心优势在于算力高度集中,通过强大的中央计算平台实现整车智能的协同调度和资源的弹性分配,软硬件完全解耦,具备极高的系统扩展性。
然而,“中央超算平台+区域控制器”架构设计复杂,技术门槛极高,对芯片算力、系统实时性、安全冗余及整车通信带宽均构成严峻挑战,是目前行业技术竞争的制高点。
结语
综上所述,中央计算+区域控制架构通过算力融合与资源虚拟化,彻底打破了功能域的界限,为高级别自动驾驶和复杂智能座舱功能提供了强大的算力基石。它代表了电子电气架构的终极发展方向,但其极高的技术复杂度和安全要求也构成了行业壁垒。目前,谁能率先规模化落地成熟可靠的该架构解决方案,谁就将在“软件定义汽车”的下半场竞争中占据绝对主导地位。
更多推荐


 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)