
激光雷达语义分割模型训练过程
细节参考:《mmdetection3d中lidar semantic parsing(激光雷达语义分割)模型解析》,类别共分为’obstacle’, ‘road’, ‘curb’, ‘vegetation’, ‘fence’, ‘ignore’, 'noise’共七类,fence包括一些墙壁,围栏,栅栏等,noise一般包括一些汽车尾汽,扬尘,雨雾等。项目中使用了几十万帧私有数据进行训练,由于算力
·
原文已经发表在知乎,辛苦移步~《激光雷达语义分割模型训练过程》
最近几天把激光雷达语义分割模型的训练流程又走了一遍,记录笔记如下。
算法介绍:
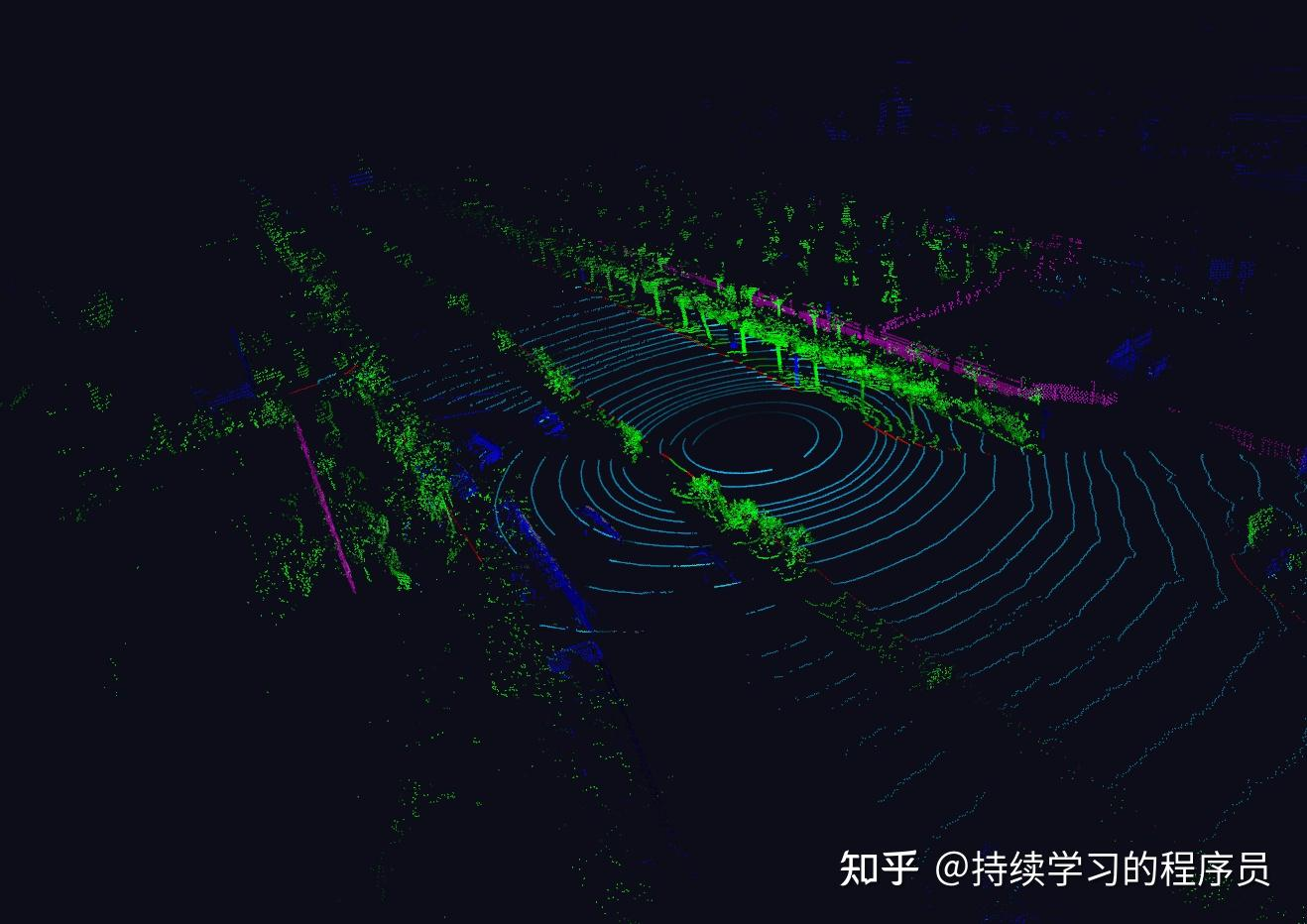
细节参考:《mmdetection3d中lidar semantic parsing(激光雷达语义分割)模型解析》,类别共分为’obstacle’, ‘road’, ‘curb’, ‘vegetation’, ‘fence’, ‘ignore’, 'noise’共七类,fence包括一些墙壁,围栏,栅栏等,noise一般包括一些汽车尾汽,扬尘,雨雾等。
数据集:
项目中使用了几十万帧私有数据进行训练,由于算力和时间限制,从中抽取了4万帧用于实验。评测集用了2000帧进行评测。
训练
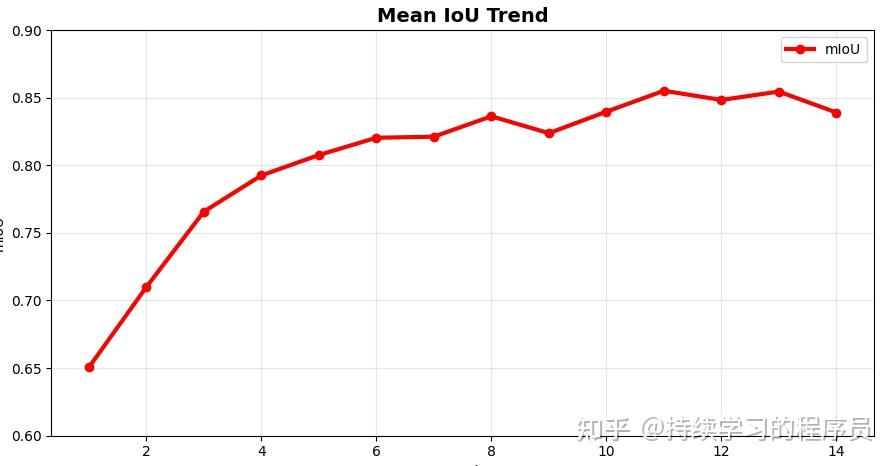
14个epoch在4张4090卡上跑了2个小时,效率还是比较高的。指标如下:
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)