
什么是 CenterNet:将目标检测问题视为关键点回归问题
CenterNet(2019)是一种创新的anchor-free物体检测模型,将物体视为中心点并通过热图预测位置,避免了传统锚框的复杂性。其架构基于关键点估计,结合热图、偏移和尺寸预测,使用多任务损失函数实现高效检测(COCO AP 42.1%,28 FPS)。相比CornerNet和YOLO,CenterNet在速度与精度间取得更好平衡。优势包括简化设计、多任务扩展性,但存在小物体检测和密集场景
1. CenterNet 的引言
CenterNet,全称为 CenterNet: Objects as Points,是计算机视觉领域中一个高效的 anchor-free 物体检测(Object Detection)模型。它由 Xingyi Zhou、Dequan Wang 和 Philipp Krähenbühl 在 2019 年提出,并在 arXiv 上发布。 CenterNet 的核心创新在于将物体视为关键点(keypoints),具体是物体的中心点,通过热图(heatmap)预测中心位置,然后回归物体的宽度、高度和偏移,从而生成边界框。这避免了传统模型如 YOLO 或 SSD 中对锚框(anchor boxes)的依赖,简化了设计并提高了泛化能力。
与其他检测器不同,CenterNet 将检测转化为关键点估计问题,类似于人体姿态估计,使用单一 CNN 端到端处理。在 MS COCO 数据集上,CenterNet 的平均精度(AP)达到 42.1%(ResNet-101 骨干),在速度上也表现出色(~28 FPS)。 到 2025 年,CenterNet 的变体如 CenterNet2 已被提出,进一步集成 Transformer,提升了在密集场景下的性能。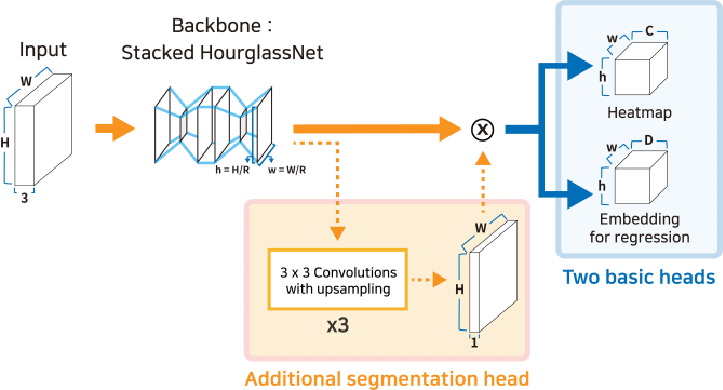
CenterNet 的名称源于其对物体“中心”(center)的强调,它标志着从锚框向关键点范式的转变,在自动驾驶、安防监控和医疗图像分析等领域广泛应用。
2. CenterNet 的背景和发展
CenterNet 的提出是为了解决 anchor-based 检测器的局限性。在 CenterNet 之前,两阶段模型如 Faster R-CNN 使用 RPN 生成锚框,但计算重;单阶段模型如 SSD 依赖大量锚框,导致参数敏感和冗余。 作者观察到,物体可以简化为中心点,这简化了问题并避免了 IoU 匹配复杂。
论文《CenterNet: Objects as Points》于 2019 年发布,灵感来源于关键点检测如 Hourglass 和 DLA(Deep Layer Aggregation)。 发展历史上,CenterNet 开启了 anchor-free 时代的浪潮,直接影响了后续模型如 FCOS 和 YOLOv5 的变体。 到 2025 年,CenterNet 的扩展如 CenterNet2 通过双级设计,提升了小物体检测,并在 NeurIPS 上获奖。
CenterNet 的影响延伸到 3D 检测和多模态任务,推动了高效 AI 的发展。
3. CenterNet 的核心组件和架构
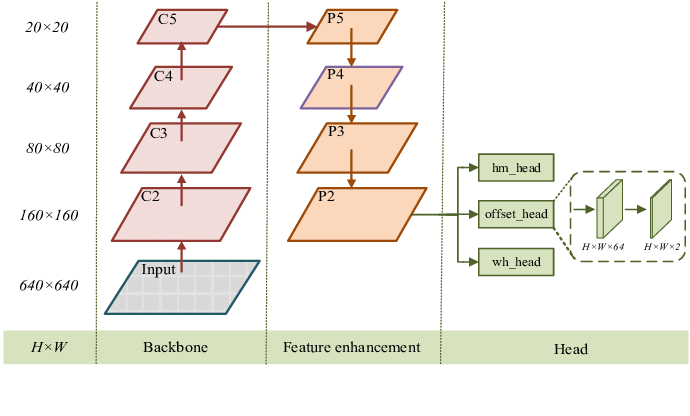
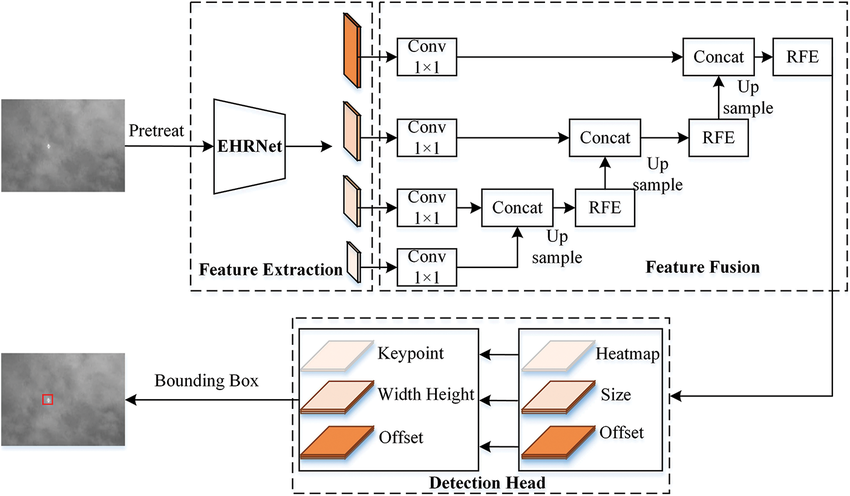
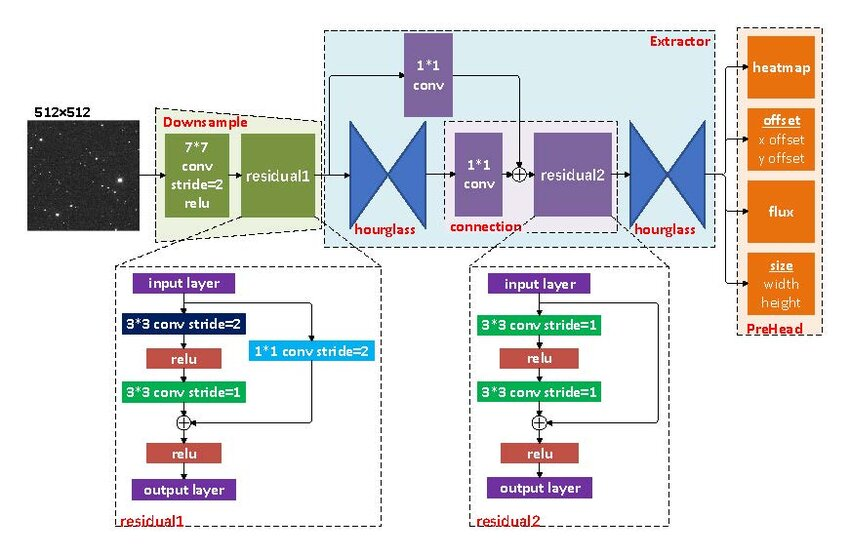
CenterNet 的架构灵活,可使用 ResNet、DLA 或 Hourglass 作为骨干。输入图像缩放到 512x512。
-
骨干网络:提取特征图(e.g., 128x128xC)。
-
热图预测(Heatmaps):预测每个类别的中心点热图,使用高斯核生成 ground truth。
-
偏移预测(Offsets):修正下采样导致的中心点偏移(2 通道)。
-
尺寸预测(Sizes):回归物体宽度和高度(2 通道)。
整体流程:图像 → 骨干 → 热图/偏移/尺寸 → 峰值提取 → 边界框(x,y,w,h = center + offset, size)。无 NMS,直接取热图峰值。
在推理中,热图 softmax 后取 top-K 峰值。
4. CenterNet 的数学公式和理论基础
CenterNet 的损失函数是多任务损失:
L = L k + λ s i z e L s i z e + λ o f f L o f f L = L_{k} + \lambda_{size} L_{size} + \lambda_{off} L_{off} L=Lk+λsizeLsize+λoffLoff
- L k L_k Lk:热图损失,使用 Focal Loss 变体:
L k = − 1 N ∑ c = 1 C ∑ x y { ( 1 − p c x y ) α log ( p c x y ) y c x y = 1 ( 1 − y c x y ) β p c x y α log ( 1 − p c x y ) o t h e r w i s e L_k = \frac{-1}{N} \sum_{c=1}^C \sum_{xy} \begin{cases} (1 - p_{cxy})^\alpha \log(p_{cxy}) & y_{cxy}=1 \\ (1 - y_{cxy})^\beta p_{cxy}^\alpha \log(1 - p_{cxy}) & otherwise \end{cases} Lk=N−1c=1∑Cxy∑{(1−pcxy)αlog(pcxy)(1−ycxy)βpcxyαlog(1−pcxy)ycxy=1otherwise
α=2, β=4, y 是高斯热图。
-
L o f f L_{off} Loff:偏移 L1 损失,仅正中心计算。
-
L s i z e L_{size} Lsize:尺寸 L1 损失。
理论基础:中心点比角点更易定位,避免锚框偏差。
5. CenterNet 与其他模型的比较
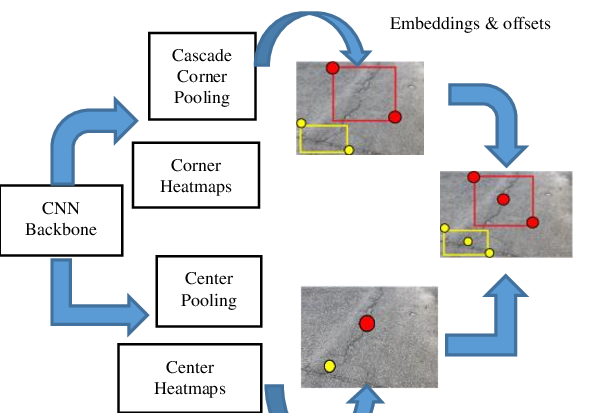
CenterNet 是单阶段 anchor-free 检测器,与 CornerNet 和 YOLO 比较。
-
相似点:实时、端到端。
-
差异点:
- CenterNet 使用中心点;CornerNet 使用角点对;YOLO 使用网格。
- 速度:CenterNet ~28 FPS;CornerNet 4 FPS;YOLOv1 45 FPS。
- AP (COCO):CenterNet 42.1%;CornerNet 42.1%;YOLOv1 ~20%。
表格比较:
| 方面 | CenterNet | CornerNet | YOLOv1 |
|---|---|---|---|
| 关键点 | 中心 | 角点对 | 无(网格) |
| AP (COCO) | 42.1% | 42.1% | ~20% |
| 机制 | 热图 + 回归 | 热图 + 嵌入 | 回归 |
CenterNet 在速度和精度平衡好。
6. CenterNet 的优势、局限性和改进
优势:
- 无锚框:简化,提升泛化。
- 高效:单一网络,快。
- 多任务:易扩展姿态/分割。
局限性:
- 小物体:热图分辨限。
- 密集:中心重叠问题。
- 骨干依赖:需深网络。
改进:CenterNet2 添加级联。
7. CenterNet 的应用
CenterNet 用于实时监控、无人机和医疗检测。在工业中,用于缺陷;在研究中,用于多模态。
8. CenterNet 的结论和未来影响
CenterNet 革新 anchor-free 检测,推动关键点方法。到 2025 年,其在 3D 中的扩展将继续影响 AI。
更多推荐
 10
10 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)