
GD32F470智能小车:双轮差速控制与多模态感知系统设计
智能小车是嵌入式系统与机电一体化技术的典型载体,其核心在于运动控制原理与多传感器协同机制。基于ARM Cortex-M4内核的高性能MCU(如GD32F470)可提供充足算力支撑实时PID闭环、状态机调度与多任务并发处理,显著提升控制精度与系统鲁棒性。在工程实践中,电源隔离设计、电平匹配规范、ADC采样与PWM死区生成等关键技术,直接决定电机响应稳定性与感知数据可靠性。该类平台广泛应用于自动寻迹、
1. 项目概述
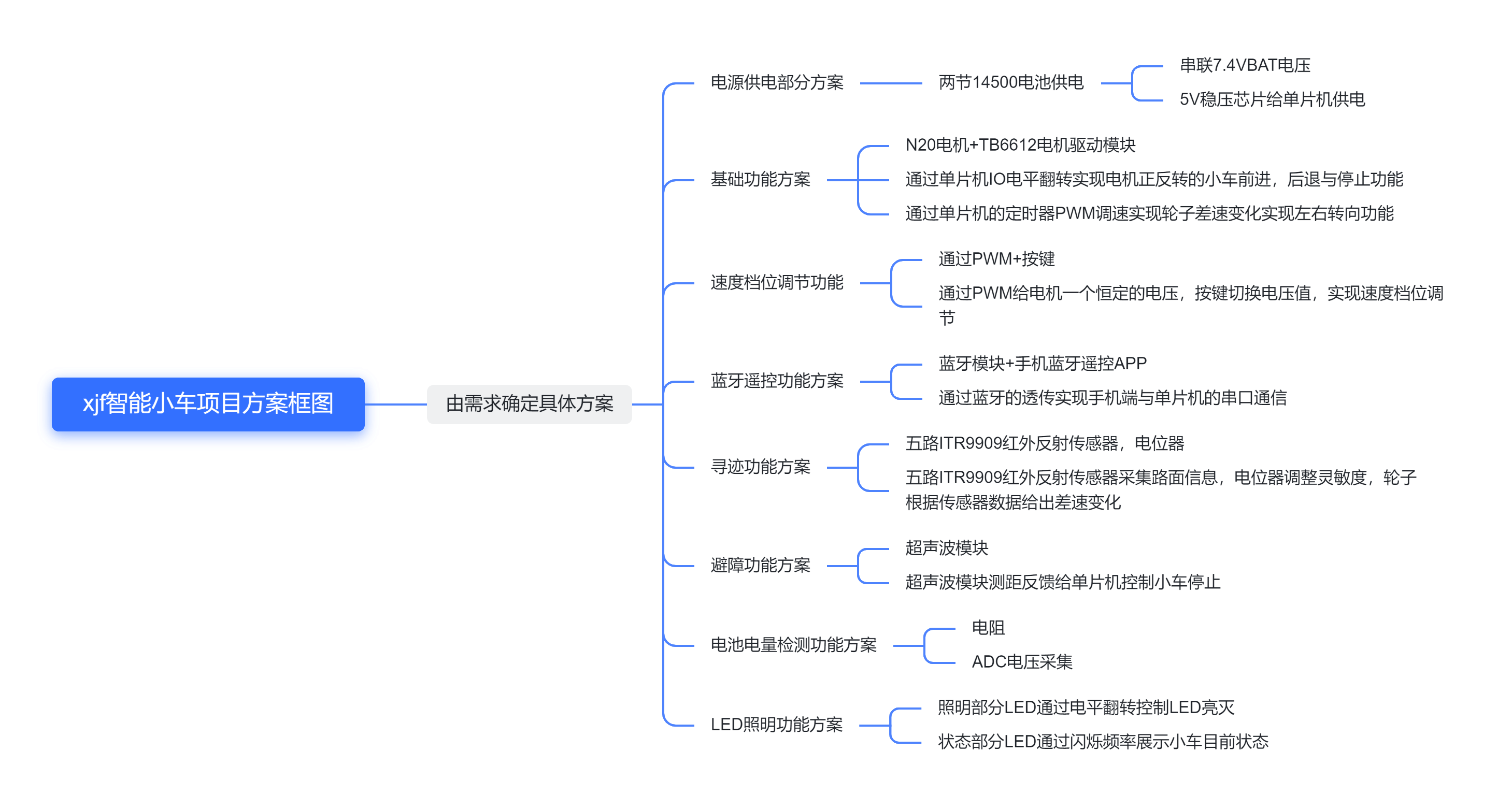
本项目是一款基于GD32F470GZT6高性能ARM Cortex-M4内核微控制器的双轮驱动智能小车平台,面向嵌入式系统学习、机电控制实践与小型自主移动机器人原型开发。系统集成寻迹、超声波避障、蓝牙无线遥控、多档位调速、电池电量监测及LED照明等六大核心功能模块,硬件架构采用模块化设计思想,软件层实现状态机驱动的多模式协同控制。
与常见以STM32F103或ESP32为控制核心的入门级小车不同,本设计选用GD32F470GZT6——该芯片主频高达200MHz,具备1024KB Flash与256KB SRAM,集成FPU、硬件除法器、多路高级定时器(含死区生成)、双ADC、USB OTG、CAN FD等丰富外设资源。虽在本项目中未完全释放其全部性能潜力,但其高主频带来的充裕计算余量,为后续扩展PID参数在线整定、多传感器数据融合、简易SLAM前端处理等进阶功能预留了坚实基础。
项目采用立创梁山派开发板作为主控载体,该板卡在保持GD32F470GZT6全部引脚可访问的前提下,集成了USB转串口芯片(CH340G)、板载LED与按键、标准SWD调试接口,并预留了完整的GPIO扩展排针。这种“开箱即用+高度可扩展”的设计范式,显著降低了硬件验证门槛,使开发者能将主要精力聚焦于运动控制算法实现与多模态行为逻辑整合。
2. 硬件系统架构与关键电路设计
2.1 系统总体架构
整个硬件系统划分为七个功能域:电源管理域、主控计算域、电机驱动域、环境感知域(含寻迹与避障)、人机交互域(含蓝牙、按键、LED、蜂鸣器)、数据采集域(电池电压)及机械执行域。各域通过标准化电平接口与清晰的信号流向进行耦合,形成层次分明、职责单一的硬件拓扑结构。
该架构的核心设计哲学在于 物理隔离与电气解耦 :电机驱动回路与数字控制回路严格分离,避免大电流瞬变对敏感模拟/数字电路造成干扰;所有外设模块均通过电平转换或光耦隔离(如必要)接入主控,确保系统鲁棒性。
2.2 电源管理设计
系统采用双电源轨供电策略,从根本上解决不同负载对电压稳定性与纹波抑制的差异化需求:
-
动力电源(7.4V) :由两节14500锂离子电池串联提供,直接供给TB6612电机驱动芯片。此设计规避了DC-DC升压环节的能量损耗,同时保证电机在启动与堵转时获得充足瞬时功率。PCB布线中,动力电源走线宽度设定为20–30mil,以承载峰值电流并降低线路压降。
-
逻辑电源(5V) :由AMS1117-5.0低压差稳压器从7.4V输入降压获得,为GD32F470GZT6主控、HC-05蓝牙模块、HC-SR04超声波模块、红外寻迹模块及LED照明电路统一供电。为抑制开关噪声与低频纹波,在AMS1117输入/输出端分别配置10μF钽电容与100μF电解电容,并在靠近芯片电源引脚处并联0.1μF陶瓷去耦电容。三重电容组合覆盖从百kHz至百MHz的全频段噪声抑制需求。
工程启示 :在电机驱动类应用中,电源滤波绝非“加个电容即可”的简单操作。此处采用的“大电容(储能)+中电容(低频滤波)+小电容(高频旁路)”三级滤波结构,是应对电机换向产生的宽频谱EMI干扰的工业级实践方案。
2.3 主控单元:GD32F470GZT6资源配置
GD32F470GZT6在本项目中承担实时调度、传感器数据处理、PWM生成、通信协议解析与状态机管理等全部核心任务。其关键外设资源分配如下表所示:
| 外设模块 | GD32F470引脚 | 功能说明 |
|---|---|---|
| UART0 | PA9/PA10 | 连接CH340G,用于程序下载与调试信息输出(printf重定向) |
| UART1 | PA2/PA3 | 连接HC-05蓝牙模块,实现AT指令集通信与透传数据收发 |
| UART2 | PA14/PA15 | 预留调试接口(本项目未启用) |
| TIM1_CH1/TIM1_CH2 | PA8/PA9 | 生成两路互补PWM(带死区),驱动TB6612的IN1/IN2与IN3/IN4,控制左右轮速 |
| TIM2 | PA0/PA1 | 作为超声波测距的计时基准(1μs精度) |
| TIM3 | PB0/PB1 | 用于按键消抖与LED闪烁的周期性扫描中断 |
| ADC1_IN0 | PA0 | 采集分压后的电池电压(对应ADC通道0) |
| ADC1_IN1~IN5 | PA1~PA5 | 五路红外寻迹传感器模拟电压输入 |
| EXTI0 | PA0 | 超声波模块Echo信号外部中断触发(下降沿) |
| GPIOx (LED/Key/Buzzer) | PB12~PB15, PC13, PC14 | 模式指示LED、启动按键、蜂鸣器控制、寻迹模块使能等 |
值得注意的是,TIM1被配置为 中心对齐PWM模式 ,其计数器在向上/向下计数过程中自动翻转,相比边沿对齐模式,可有效降低电机电流纹波,提升运行平稳性。同时,利用TIM1内置的死区发生器(Dead-Time Generator),在左右轮PWM信号间插入纳秒级不可重叠间隔,彻底杜绝TB6612内部H桥上下管直通风险。
2.4 电机驱动与执行机构
驱动单元采用TB6612FNG双H桥驱动芯片,其关键优势在于:
- 单通道持续输出电流达1.2A(峰值3.2A),远超N20减速电机额定工作电流(约300mA);
- 内置过热关断与欠压锁定保护,提升系统安全性;
- 支持双路独立PWM输入,天然适配差速转向控制。
电机选型为N20直流减速电机(300–500rpm),搭配65mm直径橡胶轮。该组合在7.4V供电下,空载转速约420rpm,额定扭矩0.15N·m,兼顾响应速度与爬坡能力。机械结构上,采用后轮驱动+前万向轮布局,确保转向灵活性与直线稳定性。
硬件陷阱警示 :原文明确指出,HC-05模块实为5V逻辑电平器件,而GD32F470GZT6的UART1引脚为3.3V容忍。若直接连接,存在通信不可靠甚至损坏模块的风险。项目中采用“飞线至端子排5V电源引脚”的应急方案,虽可临时解决,但规范做法应增加TX线路的电平转换电路(如TXB0104或分立MOSFET方案),确保信号完整性。
2.5 环境感知模块
2.5.1 五路红外寻迹系统
系统采用5路红外反射式传感器阵列,沿小车前进方向呈一字形排布,间距约15mm。每路传感器由红外发射二极管(IR LED)、光电晶体管(Phototransistor)及LM393电压比较器构成。其工作原理为:IR LED恒流发射近红外光,当光线照射到白色地面时大部分反射,光电晶体管导通程度高,比较器输出高电平;照射到黑色轨迹线时反射率骤降,光电晶体管截止,比较器输出低电平。
原文提及“可省略比较器,直接ADC采样”,此观点技术上成立,但需权衡利弊:
- ADC方案优势 :获取连续灰度值,为模糊PID、神经网络等高级算法提供原始数据;
- ADC方案劣势 :需占用5路ADC通道、增加软件滤波与阈值动态校准复杂度,且GD32F470的12位ADC在强环境光干扰下信噪比可能劣于施密特触发器整形后的数字信号。
本项目采用比较器方案,通过精密电位器调节比较器参考电压,实现对不同材质、光照强度下黑白对比度的适应性调整。传感器PCB位置被强调“应尽量前置”,此为关键工程经验——传感器距车轮轴心越近,系统对路径偏差的响应延迟越小,闭环控制带宽越高。
2.5.2 HC-SR04超声波避障模块
HC-SR04通过TRIG引脚接收10μs高电平触发信号,随后自动发射8个40kHz方波脉冲,并在Echo引脚输出与障碍物距离成正比的高电平脉宽(1mm ≈ 58.8ns)。GD32F470通过以下方式实现精准测距:
- 利用TIM2的编码器模式或输入捕获功能,精确测量Echo高电平持续时间;
- 或采用“外部中断+定时器计数”组合:TRIG触发后启动TIM2,Echo上升沿进入EXTI中断开启计数,下降沿再次进入中断读取计数值。
原文指出“使用定时器中断和外部中断测距”,印证了后者方案。该方法对主频要求低,代码逻辑清晰,是资源受限MCU的常用实践。
2.6 人机交互与状态指示
2.6.1 蓝牙无线通信
HC-05模块工作在从机模式,通过UART1与GD32F470通信。手机端APP发送ASCII指令(如'F'前进、'B'后退、'L'左转、'R'右转、'S'停止),MCU解析后更新目标速度与转向状态。为保障通信可靠性,固件中实现了简单的帧头校验与超时重传机制。
2.6.2 按键与LED状态机
系统定义四种工作模式,由单个物理按键循环切换:
- Mode 0(初始化) :LED熄灭,等待用户指令;
- Mode 1(蓝牙遥控) :LED以2秒周期闪烁,表示等待手机连接与指令;
- Mode 2(避障巡航) :LED以1秒周期闪烁,小车直行,遇障后执行“后退→右转→前进”避障逻辑;
- Mode 3(自动寻迹) :LED以200ms高频闪烁,启动PID差速闭环控制。
所有LED闪烁与按键消抖均由TIM3的周期性中断服务程序统一调度,避免了传统延时函数导致的CPU阻塞,确保实时性。
2.6.3 蜂鸣器报警
蜂鸣器采用有源型,仅需3.3V直流驱动即可发声。原文三次强调“必须改为3.3V供电”,原因在于:若误接5V,蜂鸣器内部振荡电路将因过压而失控,表现为常响或异常啸叫。此细节凸显了硬件设计中“器件手册是唯一真理”的铁律。
2.7 电池电量监测
采用电阻分压网络(R1:R2:R3 = 1:1:1)对7.4V电池电压进行三等分,输出约2.47V送入ADC1_IN0通道。GD32F470的ADC参考电压为3.3V,12位分辨率下LSB = 3.3V / 4096 ≈ 0.8mV。通过校准分压比与ADC偏移误差,可将采样值精确映射为实际电池电压。
电量百分比计算并非线性映射,而是依据锂电放电曲线建立查表法(LUT):满电(8.4V)对应100%,截止电压(6.0V)对应0%。当电量低于10%时,蜂鸣器鸣响提示,避免过放损伤电池。
3. 软件系统设计与关键算法实现
3.1 主程序框架:基于状态机的事件驱动模型
整个软件系统构建于一个轻量级协作式操作系统雏形之上,其核心为 main() 循环中调用的 System_Run() 函数,该函数按固定周期(10ms)轮询执行以下任务:
void System_Run(void)
{
static uint32_t tick = 0;
tick++;
// 1. 按键扫描(去抖后更新模式状态)
Key_Scan();
// 2. 传感器数据采集(ADC、超声波、寻迹)
Sensor_Acquire();
// 3. 根据当前模式,执行对应控制逻辑
switch(g_SystemMode)
{
case MODE_BLUETOOTH: Bluetooth_Control(); break;
case MODE_OBSTACLE: Obstacle_Avoidance(); break;
case MODE_LINE_TRACE: Line_Tracking_PID(); break;
default: Motor_Stop(); break;
}
// 4. 执行LED与蜂鸣器状态更新
LED_Buzzer_Update();
}
此设计将硬件抽象、业务逻辑与外设驱动严格分层,极大提升了代码可维护性与功能可扩展性。
3.2 寻迹控制:差速PID闭环算法
寻迹的核心是将5路传感器的数字状态(00000 ~ 11111)转化为左右轮的速度差。本项目采用经典的 位置式PID差速环 ,其离散化公式为:
$$ \Delta u(k) = K_p \cdot e(k) + K_i \cdot T_s \sum_{i=0}^{k} e(i) + K_d \cdot \frac{e(k)-e(k-1)}{T_s} $$
其中,$e(k)$为当前时刻的偏差值,由传感器状态码经加权计算得出。例如,定义权重数组 int8_t weight[32] = { -2, -2, -1, -1, 0, 0, 0, 0, ... , 1, 1, 2, 2 }; ,则偏差 $e = \sum_{i=0}^{4} (sensor[i] ? weight[code] : 0)$。
原文坦承“因硬件原因效果不理想”,结合其传感器居中布置的缺陷,可推断问题根源在于:当小车偏离轨迹时,中央传感器已脱离黑线,但两侧传感器尚未触发,导致偏差计算滞后,PID控制器无法及时纠正。此案例深刻揭示了**“算法性能上限由最薄弱的硬件环节决定”** 的系统工程本质。
3.3 超声波避障逻辑
避障程序采用确定性有限状态机(FSM),包含 STATE_FORWARD 、 STATE_BACKWARD 、 STATE_TURN_RIGHT 、 STATE_TURN_LEFT 四个状态。其核心逻辑如下:
void Obstacle_Avoidance(void)
{
static uint8_t state = STATE_FORWARD;
static uint32_t state_timer = 0;
uint16_t distance = Get_Ultrasonic_Distance(); // 获取实时距离
switch(state)
{
case STATE_FORWARD:
if(distance < 150) // 15cm为安全阈值
{
Motor_SetSpeed(0, 0);
state = STATE_BACKWARD;
state_timer = HAL_GetTick();
}
else
{
Motor_SetSpeed(80, 80); // 全速前进
}
break;
case STATE_BACKWARD:
if(HAL_GetTick() - state_timer > 500) // 后退500ms
{
Motor_SetSpeed(0, 0);
state = STATE_TURN_RIGHT;
state_timer = HAL_GetTick();
}
else
{
Motor_SetSpeed(-60, -60); // 缓慢后退
}
break;
case STATE_TURN_RIGHT:
if(HAL_GetTick() - state_timer > 800) // 右转800ms(约90度)
{
Motor_SetSpeed(0, 0);
state = STATE_FORWARD;
}
else
{
Motor_SetSpeed(-50, 50); // 左轮后退,右轮前进 → 右转
}
break;
}
}
该逻辑简洁可靠,无需复杂路径规划,适用于结构化室内环境。
4. BOM清单与关键器件选型依据
| 序号 | 器件名称 | 型号/规格 | 数量 | 选型依据 |
|---|---|---|---|---|
| 1 | 主控MCU | GD32F470GZT6 | 1 | 高主频、大内存、丰富外设,为算法预留升级空间 |
| 2 | 电机驱动 | TB6612FNG | 1 | 双H桥、大电流、内置保护,优于L298N等老式驱动芯片 |
| 3 | 无线模块 | HC-05 (5V TTL) | 1 | 成本低廉、协议成熟、手机APP生态完善 |
| 4 | 超声波模块 | HC-SR04 | 1 | 测距稳定、成本极低、易于与MCU集成 |
| 5 | 红外寻迹传感器 | TCRT5000 (5路) | 1 | 集成发射/接收、模拟输出可调,性价比最优 |
| 6 | 稳压芯片 | AMS1117-5.0 | 1 | 低压差、高PSRR,适合电池供电场景 |
| 7 | USB转串口 | CH340G | 1 | 兼容性好、驱动成熟、成本可控 |
| 8 | 电源开关 | 自锁拨动开关 | 1 | 物理隔离动力电源,保障调试安全 |
| 9 | LED | 0805贴片白光LED | 4 | 低功耗、高亮度,满足照明与氛围灯双重需求 |
| 10 | 蜂鸣器 | 3.3V有源蜂鸣器 | 1 | 驱动简单、声音稳定,避免无源蜂鸣器需额外驱动电路 |
5. PCB设计要点与工程实践反思
PCB设计严格遵循高速数字电路与功率电路混合布局原则:
- 电源分割 :7.4V动力电源平面与5V逻辑电源平面在PCB底层物理隔离,仅在AMS1117输入端单点连接,切断噪声耦合路径;
- 地平面完整性 :采用完整铺铜地平面,所有IC的地引脚通过多个过孔就近连接到底层地,降低共模阻抗;
- 敏感信号走线 :ADC输入线、晶振走线全程包地,避免串扰;
- 机械结构适配 :螺丝孔位精确匹配小车底盘,红外传感器焊盘位置经实测优化,确保其发射/接收窗口正对地面。
项目文档中坦诚反思了若干设计失误,极具工程教育价值:
- 传感器位置偏差 :初始将寻迹模块置于PCB中部,导致响应延迟,后通过固件补偿仍难达理想效果。此教训表明, 机械结构设计必须与控制算法同步迭代 ;
- 模块电平不匹配 :HC-05与GD32的电平冲突,暴露了BOM采购阶段未严格核对器件手册的疏漏;
- 蜂鸣器供电错误 :险些因忽略有源/无源类型差异导致硬件故障,印证了“每一个元器件都值得被敬畏”的硬件工程师信条。
这些并非失败,而是嵌入式系统开发中必经的、最宝贵的经验沉淀。每一次飞线、每一次改板、每一次深夜调试,都在无声塑造着工程师对物理世界运行规律的深刻理解——这正是本项目超越单纯功能实现,所传递的核心价值。
更多推荐
 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)