
打造水上特斯拉!基于电鱼智能 RK3568 的智能路亚船“视觉避障+显控一体”方案
传统路亚船(打窝船)正面临智能化升级的瓶颈:简单的 GPS 定位已无法满足复杂水域的自动驾驶需求。本文解析如何利用 电鱼智能 EFISH-SBC-RK3568 的 NPU 算力与丰富工业接口,构建具备视觉避障、声呐成像与 CAN 总线控制的新一代智能船控系统,实现从底层电机驱动到上层人机交互(HMI)的单芯片全栈集成。
什么是 电鱼智能 EFISH-SBC-RK3568?
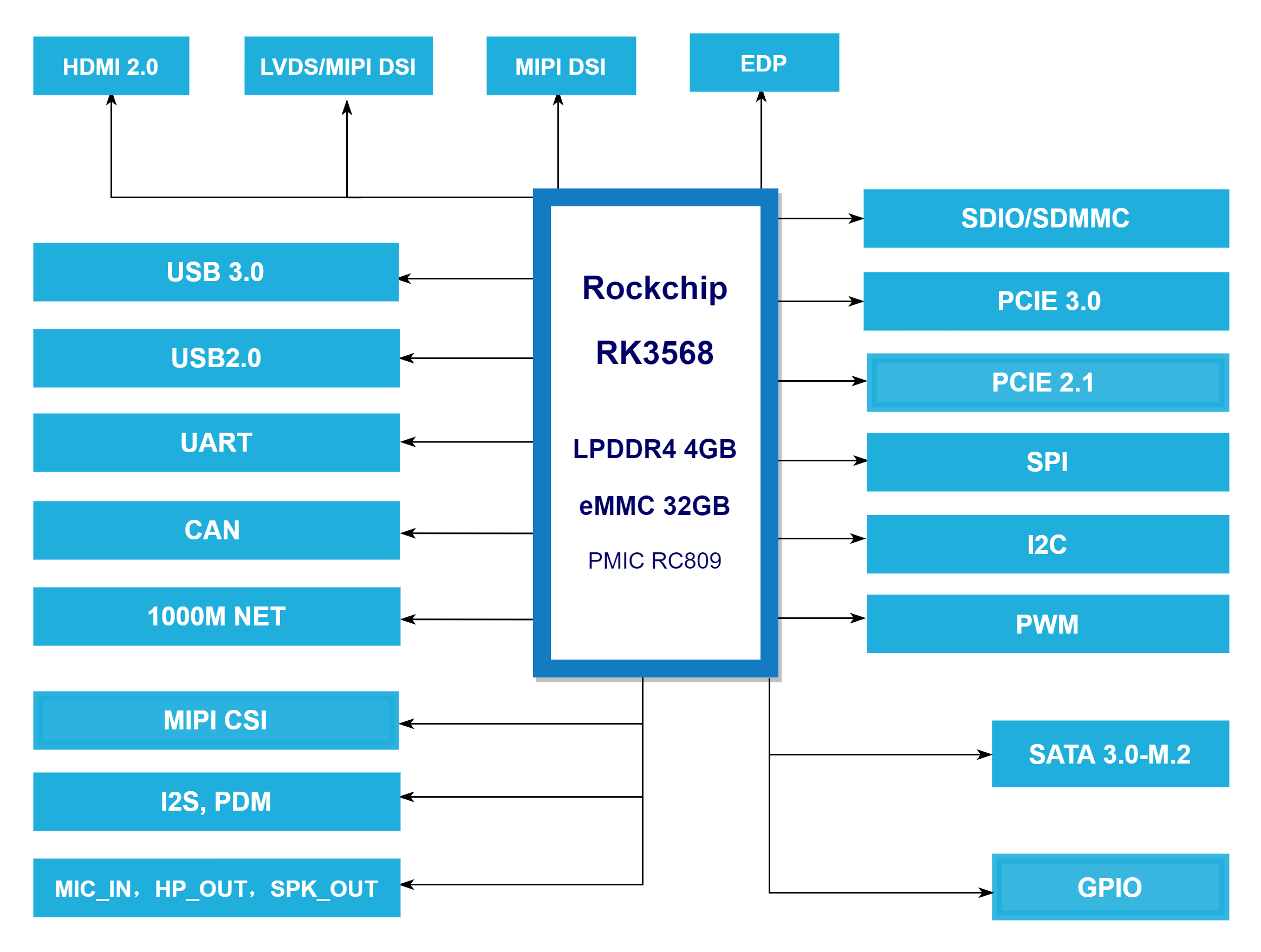
电鱼智能 EFISH-SBC-RK3568 是一款基于瑞芯微 RK3568 SoC 的工业级单板计算机。它集成了 四核 Cortex-A55 @ 2.0GHz 处理器与 Mali-G52 GPU,板载 4GB LPDDR4 内存与 32GB eMMC 存储 。该平台专为中高端工业控制设计,最大的特点是拥有 1TOPS NPU(内置于 RK3568)用于轻量级 AI 推理,并提供 3屏异显 能力及 2路 CAN、6路串口 等丰富外设 ,是智能机器人与无人船的理想“大脑”。
为什么 智能路亚船 需要这款硬件?(选型分析)
在开发具备自动寻点、自动避障功能的高端路亚船时,工程师常面临 STM32 算力不足、树莓派接口不够的尴尬。EFISH-SBC-RK3568 通过以下特性解决了核心痛点:
1. 视觉 AI 与算力冗余
水面环境复杂,充满了芦苇、浮木和礁石。RK3568 内置的 NPU 支持 TensorFlow/PyTorch/ONNX 模型,可流畅运行 YOLOv5-Nano 等轻量级目标检测算法,实时识别水面障碍物并调整航向,无需依赖昂贵的激光雷达。其四核 2.0GHz 的主频 足以同时处理视觉数据流与路径规划逻辑。
2. 原生 CAN 总线与多串口控制
传统开发板通常需要 USB 转 CAN 模块,稳定性差。该主板原生支持 2 x CAN 接口 ,可直接控制工业级电调(ESC)或无刷电机,实现精准的差速转向。同时,板载的 6 x RS232 和 2 x RS485 完美适配 GPS/RTK 模块、电子罗盘以及水下声呐探头,无需任何扩展板。
3. 显控一体化 (HMI)
为了提升用户体验,手持遥控端或船体本身往往需要一块高亮屏幕显示声呐鱼探画面。EFISH-SBC-RK3568 支持 HDMI 1.4/2.0、eDP 和 LVDS 接口,支持三屏同显或异显 。这意味着你可以在一块板卡上同时处理自动驾驶逻辑,并通过 LVDS/eDP 直接驱动船载触摸屏,运行 Qt 开发的仪表盘界面。
4. 宽压输入与电源管理
船载电池通常为 3S 或 4S 锂电(12V-16V)。该主板支持 DC 9~36V 宽压输入 ,可直接连接船载电池,无需额外的降压稳压模块(DCDC),简化了整船电路设计。
系统架构与数据流 (System Architecture)
本方案采用“感知-决策-控制”全集成架构,替代了传统的“MCU飞控 + 手机APP”模式。
拓扑逻辑
-
感知层:
-
视觉:USB/MIPI 摄像头采集水面图像 -> 传入 RK3568 NPU 进行障碍物推理。
-
定位:RTK/GPS 模块 -> 通过 UART (RS232) 传入经纬度。
-
探鱼:声呐传感器 -> 通过 RS485 传入水深与回波数据。
-
-
决策层:EFISH-SBC-RK3568 运行 Ubuntu/Linux,融合视觉与 GPS 数据,计算局部路径规划。
-
控制层:通过 CAN 接口 发送转速指令给左右电机电调。
-
交互层:通过 4G/5G 模块 将视频流和鱼探数据回传至岸边手机或手持终端。
推荐软件栈
-
OS: Ubuntu 20.04 (便于 ROS2 开发) 或 Buildroot (极速启动) 。
-
AI: RKNN-Toolkit2 (用于将 YOLO 模型转换为 NPU 格式)。
-
Control: ROS2 (Robot Operating System) 或 Python CAN library。
-
UI: Qt 5.12 for Embedded Linux。
关键技术实现 (Implementation)
1. 视觉避障推理 (Python/RKNN 伪代码)
利用 NPU 进行水面障碍物推理,判断“左转”或“右转”。
Python
from rknnlite.api import RKNNLite
import cv2
# 初始化 RKNN (使用 NPU)
rknn_lite = RKNNLite()
rknn_lite.load_rknn('./yolov5s_water_quant.rknn')
rknn_lite.init_runtime()
def visual_pilot(frame):
# 预处理图像
img_data = cv2.resize(frame, (640, 640))
# NPU 推理
outputs = rknn_lite.inference(inputs=[img_data])
# 解析检测结果 (伪代码逻辑)
obstacles = post_process(outputs)
if obstacles.exists_in_center():
return "TURN_LEFT"
else:
return "KEEP_STRAIGHT"
2. CAN 总线电机控制 (Linux Shell)
在调试电机驱动时,无需编写复杂代码,直接使用 Linux 的 can-utils 工具即可测试。
Bash
# 配置 CAN0 接口,波特率 500K
ip link set can0 up type can bitrate 500000
# 发送控制指令 (假设 ID 0x123 是左电机,数据控制转速)
cansend can0 123#0500
# 监听总线数据 (读取电调反馈的转速/电流)
candump can0
性能表现 (理论预估)
-
启动速度:若采用 Buildroot 系统裁剪,冷启动至 UI 界面时间可控制在 10秒以内,满足即开即用的需求。
-
AI 帧率:运行量化后的 YOLOv5-Nano 模型 (640x640),RK3568 的 NPU 帧率预计可达 30~40 FPS,满足船速 5m/s 以下的实时避障需求。
-
通信延迟:通过板载千兆网口或 5G 模块,视频回传延迟可控制在 200ms 左右。
常见问题 (FAQ)
Q1: 如何解决户外强光下屏幕看不清的问题?
A: EFISH-SBC-RK3568 支持 LVDS 和 eDP 接口 。建议选型时搭配 1000 nits 以上的高亮工业触摸屏,并通过板载的 PWM 接口 (参考核心板引脚定义) 调节背光亮度。
Q2: 船体内部空间有限,散热需要风扇吗?
A: RK3568 的 TDP (热设计功耗) 仅为 2W ,功耗极低。在大多数封闭船舱内,只需使用被动散热片或将导热贴贴在铝合金船体上即可,无需风扇,提高了防水可靠性。
Q3: 是否支持双目深度相机?
A: 支持。板卡配备了 2 x USB 3.0 接口 ,带宽足以连接 Realsense 或奥比中光等双目深度相机,实现更高精度的 3D 避障。
更多推荐
 24
24 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)