
飞控技术区别与难点分析
低成本传感器的噪声处理:如何通过算法(如卡尔曼滤波及其变种)有效滤除MEMS传感器的噪声和温漂,获得足够精确的姿态和位置信息,是核心挑战。算力与功耗的平衡:在有限的处理器性能和电池电量下,既要完成复杂的状态估计(如SLAM)、控制运算,还要处理视觉等传感器数据,优化难度大。控制器设计的鲁棒性:设计的控制器必须能适应模型不确定性、外部强风扰动、燃料消耗导致的重量与重心变化等,保证在所有工况下的稳定性
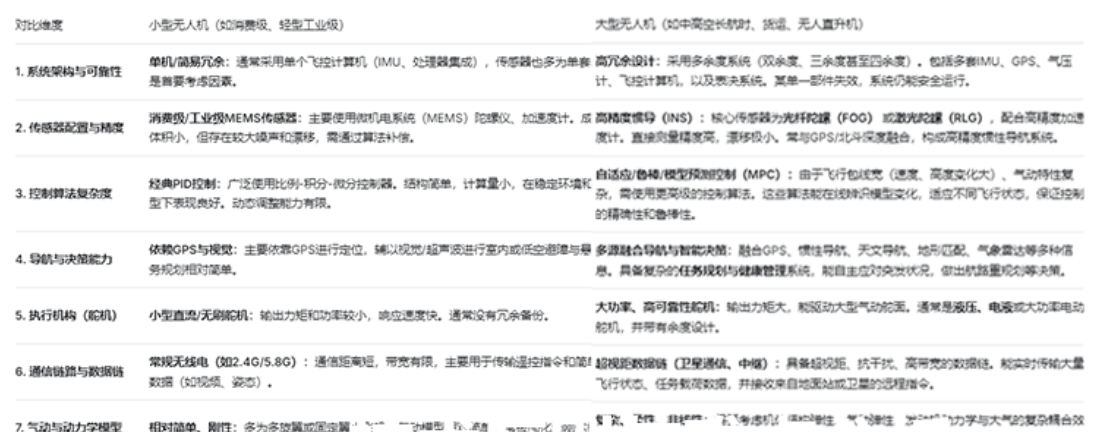
一、主要技术区别
我们可以从以下几个维度来理解这些区别:
二、技术难点
基于以上区别,我们可以总结出各自领域的技术难点:
小型无人机的技术难点:
1.资源受限下的性能优化:
算力与功耗的平衡:在有限的处理器性能和电池电量下,既要完成复杂的状态估计(如SLAM)、控制运算,还要处理视觉等传感器数据,优化难度大。
低成本传感器的噪声处理:如何通过算法(如卡尔曼滤波及其变种)有效滤除MEMS传感器的噪声和温漂,获得足够精确的姿态和位置信息,是核心挑战。
2.在复杂环境下的感知与避障:
在GPS拒止环境(如室内、桥下、楼宇间)实现稳定、精确的定位和导航。
基于视觉、激光雷达的实时避障算法,需要低延迟、高可靠性,这对算力和算法提出了极高要求。
3.群体协同与自主化:
实现多架无人机的自主编队、协同作业,涉及通信、同步、路径规划等复杂问题,是当前研究的热点。
大型无人机的技术难点:
1.系统可靠性与安全性设计:
余度管理:如何设计高效的故障检测、隔离与重构(FDIR)系统。当某个部件失效时,系统能无缝切换到备份部件,并重构控制律,保证飞行安全。这是最高难点的之一。
开发与验证流程:必须遵循严格的航空标准(如DO-178C, DO-254),整个开发、测试和验证流程极其复杂和昂贵。
2.复杂动力学下的高精度控制:
模型建立与验证:建立精确的、覆盖全飞行包线的气动和动力学模型非常困难,往往需要海量的风洞试验和试飞数据。
控制器设计的鲁棒性:设计的控制器必须能适应模型不确定性、外部强风扰动、燃料消耗导致的重量与重心变化等,保证在所有工况下的稳定性和性能。
3.长航时、超视距导航与通信:
高精度组合导航:长时间飞行中,惯性导航的误差会累积,如何与GPS、天文导航等有效融合,抑制误差发散是关键。
安全可靠的数据链:超视距通信的延迟、带宽限制和抗干扰能力是巨大挑战,尤其在军事或关键任务中。
4.空气动力学与推进系统集成:
大型无人机(特别是固定翼)的机体、机翼、发动机之间的耦合效应显著,控制设计需要考虑整个推进系统的动态特性,复杂度远高于小无人机。

更多推荐
 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)