
基于查表法的电动汽车永磁同步电机电驱驱动控制MATLAB仿真模型
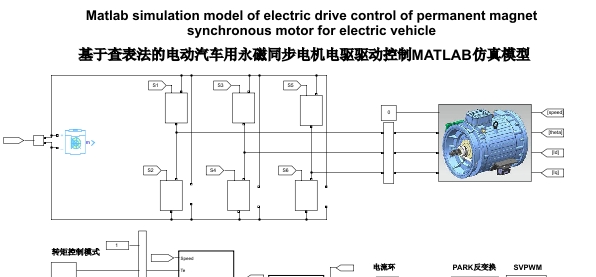
基于查表法的电动汽车用永磁同步电机电驱驱动控制MATLAB仿真模型
查表法在电机控制里属于那种"简单粗暴但有效"的存在。咱们搞电动汽车驱动的时候,经常要在实时性和计算精度之间找平衡。比如永磁同步电机的电流环控制,传统方法要实时解算三角函数和坐标变换,这对控制器的算力要求可不低。这时候查表法就像个老司机——提前把路线规划好,开车时直接照着导航走。
先看个典型的查磁链角度的例子。在MATLAB里整二维查找表,可以这么玩:
% 生成dq轴电流查表矩阵
id_vec = -200:10:200; % d轴电流范围
iq_vec = 0:10:400; % q轴电流范围
flux_table = zeros(length(id_vec), length(iq_vec));
for i = 1:length(id_vec)
for j = 1:length(iq_vec)
% 这里可以是磁链计算模型或实测数据
flux_table(i,j) = 0.5*id_vec(i) + 0.3*sqrt(iq_vec(j));
end
end这个二维数组存着不同电流组合对应的磁链值。实际运行的时候,用当前id、iq值做双线性插值,比实时计算省事多了。不过要注意电流范围别超过表格边界,否则就像导航开进死胡同。
坐标变换是查表法的重头戏。Clark变换的查表实现可以这么搞:
function [i_alpha, i_beta] = clark_transform_lut(ia, ib)
% 预存好的sin120和cos120值
lut_sin120 = 0.8660;
lut_cos120 = -0.5;
i_alpha = ia;
i_beta = (ib - 0.5*ia) * 2/3 * (1/lut_sin120);
end这种写法直接把三角函数值固化,避免了每次计算的开销。不过要注意的是,当电流谐波较大时,查表法的精度可能会打折扣,这时候就得适当加密表格的分辨率。
模型搭建时记得把查表模块和控制系统做集成。在Simulink里拖个2D Lookup Table模块,参数设置里把flux_table导入。有个容易踩的坑是插值方法选错——比如电机工作点刚好在表格数据中间时,选nearest邻居插值会产生明显台阶,换成linear线性插值就顺滑多了。
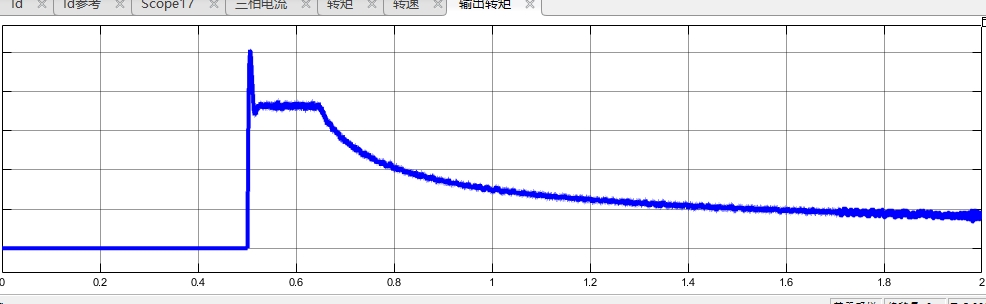
实际跑仿真的时候,建议用变步长求解器。有次我偷懒用了固定步长,结果查表时的微小延迟导致电流环震荡,波形抖得跟心电图似的。后来改成ode23t,问题迎刃而解。
查表法也不是万金油,特别是在弱磁控制区域。当电机转速超过基速时,得动态调整查表参数。这时候可以做个三级查表策略:
if speed < base_speed
table_index = 1;
elseif speed < 1.5*base_speed
table_index = 2;
else
table_index = 3;
end
current_limit = limit_table(table_index);这种分段处理就像给控制器装了个手动挡,不同速度区间切换不同的参数表。调试的时候记得在转速过渡区留点余量,别让参数突变搞得电机"闪了腰"。
最后说个实战经验:做查表数据时千万别迷信理论模型。有次按教科书参数做的表格,装车实测时效率低了5%。后来用实测数据反向修正表格,效率立马上来了。所以查表法本质是数据驱动,得相信实测数据比纸面公式靠谱。
更多推荐


 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)