
大转角悬臂梁的ANCF分析MATLAB源码实践

简介:本源码集为使用MATLAB进行大转角ANCF梁分析提供支持,特别关注于悬臂梁这类工程中常见结构。ANCF是一种用于模拟非线性动力学问题的先进有限元方法,允许节点在非线性空间中进行平动与旋转,适用于大转动和大变形。通过详细步骤,包括模型定义、元素构造、边界条件施加、荷载应用、求解过程以及结果后处理,ANCF梁模型能精确模拟悬臂梁的行为。源码库的使用和学习,有助于深入理解ANCF方法及其在MATLAB环境中的应用。 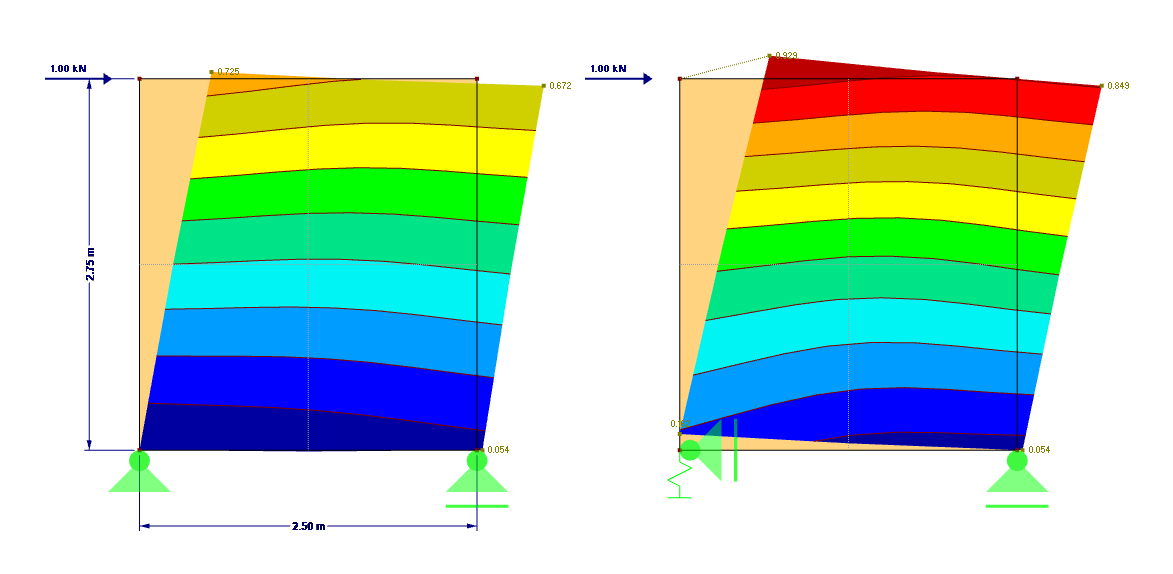
1. ANCF基本概念与优势
1.1 ANCF的定义和起源
连续体杆件分析(ANCF)是近来迅速发展的一种用于复杂结构分析的计算力学方法。它由一组数学方程构成,用于模拟物理连续体的动态行为。ANCF的核心思想是通过引入参数化的几何描述,将连续体结构离散化为一组杆件单元,进而利用数值积分技术求解结构的动力学响应。
1.2 ANCF与传统方法的对比优势
与传统的有限元方法(FEM)相比,ANCF具有处理大转动和大变形问题的优势,尤其适用于高度非线性动力学系统的分析。ANCF无需复杂的元素更新算法,因此数值稳定性更好,计算效率更高,特别适合于复杂载荷下的结构响应分析。
1.3 ANCF的核心价值和应用场景
ANCF的核心价值在于其对复杂几何和物理非线性问题的处理能力,使得工程师能够对实际工程问题,如汽车碰撞、机器人运动、生物力学分析等领域中的结构动态响应进行精确模拟。ANCF的应用减少了对试验和原型测试的依赖,加快了设计和验证的周期,降低了研发成本。
2. 悬臂梁大转动分析
2.1 悬臂梁的力学行为
2.1.1 悬臂梁在静力载荷下的响应
悬臂梁作为一种常见的结构构件,在静力载荷作用下的响应分析是结构力学中的基础问题。静力载荷指的是那些随时间不发生变化的载荷,例如重力、静态施加的力等。在这种情况下,悬臂梁的应力、应变以及变形可以通过弹性理论进行计算。
为了得到悬臂梁的精确响应,需要进行以下几个步骤:
- 材料与截面属性定义 :首先,需要定义梁的材料属性,如弹性模量E和泊松比ν,以及截面属性,比如截面面积A、惯性矩I等。
- 载荷和支撑条件 :确定梁上的载荷(如集中载荷、均布载荷)以及支撑条件(简支、固定等)。
- 求解微分方程 :应用弯曲的微分方程(如 Euler-Bernoulli 梁方程),结合边界条件,求解出弯矩、剪力、挠度等分布情况。
在这里,可以用一个简单的代码示例来展示如何在 MATLAB 中模拟一个悬臂梁的静力响应。我们将使用数值方法来近似计算结果:
% 悬臂梁材料和几何参数定义
E = 210e9; % 弹性模量, Pa
I = 1e-4; % 惯性矩, m^4
L = 2; % 梁的长度, m
F = 1000; % 施加的集中载荷, N
% 划分单元
num_elements = 20; % 单元数量
x = linspace(0, L, num_elements+1); % 节点位置
% 初始化位移向量
u = zeros(num_elements+1, 1);
% 应用边界条件和载荷
u(1) = 0; % 简支端固定
F_app = [zeros(num_elements-1, 1); F]; % 施加集中载荷
% 解线性方程组得到节点位移
K = stiffness_matrix(E, I, L, num_elements); % 刚度矩阵
U = K \ F_app; % 位移求解
% 输出结果
disp('节点位移:');
disp(U);
% 显示结果函数定义
function K = stiffness_matrix(E, I, L, num_elements)
% 计算全局刚度矩阵
K = zeros(num_elements+1, num_elements+1);
for i = 1:num_elements
Ke = element_stiffness(E, I, L/num_elements);
row = i*2-1:i*2;
K(row, row) = K(row, row) + Ke;
end
% 最后一个单元的刚度矩阵
Ke = element_stiffness(E, I, L/num_elements);
row = num_elements*2;
K(row, row) = K(row, row) + Ke;
end
function Ke = element_stiffness(E, I, le)
% 计算局部刚度矩阵
k = E*I/le^3;
Ke = [12 6*le -12 6*le; 6*le 4*le^2 -6*le -2*le^2; -12 -6*le 12 6*le; 6*le 2*le^2 -6*le 4*le^2];
Ke = k * Ke;
end
2.1.2 悬臂梁在动力载荷下的响应
悬臂梁在动力载荷作用下的响应涉及到时间因素,即结构的动态特性。这包括了固有频率、振动模式以及由于时间变化的载荷而产生的响应。与静力分析不同,动力分析需要解决的是时域内的微分方程。
动力分析的关键步骤包括:
- 建立动力微分方程 :应用梁的动力学方程,例如 Euler-Bernoulli 方程或 Timoshenko 方程,并考虑质量分布和阻尼效应。
- 模态分析 :通过模态分析确定结构的振动特性,计算其固有频率和模态形状。
- 求解时域响应 :利用数值方法如Newmark方法、Wilson-θ方法等,求解动力微分方程,获得不同时刻的响应。
对于悬臂梁在动力载荷下的响应分析,可以使用以下的 MATLAB 代码来说明:
% 假设参数
m = 1; % 单位长度质量,kg/m
c = 0.5; % 阻尼系数,Ns/m
omega = 10; % 动态载荷频率,rad/s
F = 100; % 动态载荷幅值,N
% 计算固有频率和模态
omega_n = (pi^2) * sqrt(E*I/(m*L^4)); % 一阶固有频率
phi = sin(pi*x/L); % 一阶模态形状
% 动态响应计算(简化模型,无阻尼)
% 假设动态载荷作用在自由端,计算其响应
t = linspace(0, 1, 100); % 时间向量
U = zeros(length(t), 1);
for i = 1:length(t)
% 计算载荷项
f = F * phi(L) * sin(omega * t(i));
% 构建质量矩阵
M = m * L / 3 * diag([1, 1, 2, 2]);
% 求解动态平衡方程
U(i) = (f/M * phi(L)) / (omega_n^2 - omega^2);
end
% 绘制位移响应随时间的变化曲线
plot(t, U);
xlabel('时间 (s)');
ylabel('位移响应 (m)');
title('悬臂梁在动态载荷下的位移响应');
以上代码段展示了在无阻尼情况下,如何用简化的模型计算悬臂梁在给定动态载荷作用下端点的位移响应。实际的动态分析通常更为复杂,需要考虑阻尼和其他高阶模态的影响。
2.2 大转动现象的数学描述
2.2.1 大转动的定义及其对结构分析的影响
在结构分析中,大转动通常指的是体系在某一方向上转动角度大于15度到20度的情况。当结构受到大转动影响时,传统的线性假设将不再适用,必须采用非线性理论进行描述。大转动现象在结构设计和分析中具有重要影响,因为它涉及到结构在大变形下的力学行为,可能会导致结构出现屈曲、失稳等现象。
在大转动分析中,基本假设是:
- 材料行为是非线性的,包括材料非线性和几何非线性。
- 结构可能经历显著变形,如弯曲、扭转以及局部化的变形。
对于大转动的数学描述,一个重要的概念是有限转动的概念,它允许任意大小的旋转,同时保证旋转的可加性。大转动的数学表达通常依赖于旋转矢量或者旋转矩阵。旋转矢量是一个向量,其长度与旋转的角度成正比,方向与旋转轴的方向一致;而旋转矩阵则描述了在旋转操作后,点的坐标是如何变换的。
2.2.2 大转动理论在悬臂梁分析中的应用
在悬臂梁大转动分析中,大转动理论的应用体现在对大变形、非线性行为的考虑上。这将影响梁的整体力学性能,如固有频率的改变、屈曲行为的发生等。当悬臂梁承受较大载荷时,其变形不仅包括弯曲,还有可能伴随有扭转和轴向伸缩等,这些都须在分析中考虑。
在应用大转动理论进行悬臂梁分析时,关键步骤包括:
- 建立非线性模型 :利用描述大转动的数学工具建立梁的非线性运动方程。
- 求解非线性方程 :由于非线性方程往往没有封闭形式的解,因此需要采用数值方法求解。例如,使用增量法、迭代法、有限元方法等。
- 后处理分析 :对得到的非线性响应结果进行分析,如绘制变形图、应力分布图等,并结合结构评估指标来判定结构的安全性。
下面是一个简化的 MATLAB 示例代码,用以说明如何应用大转动理论进行悬臂梁分析:
% 假定参数
E = 210e9; % 弹性模量, Pa
I = 1e-4; % 惯性矩, m^4
L = 2; % 梁的长度, m
F = 5000; % 大转动载荷, N
% 初始化几何变量和载荷
angle = pi/18; % 大转动角度
N = 100; % 单元划分数量
nodes = linspace(0, L, N+1); % 节点位置
end_node = nodes(end); % 梁端节点位置
% 定义初始条件和载荷
u0 = zeros(N+1, 1); % 初始位移场
F_app = [zeros(N-1, 1); F]; % 施加的载荷
% 使用非线性迭代求解器计算响应
u = nonlinear_solver(E, I, nodes, F_app, u0);
% 输出最终结果
disp('最终节点位移:');
disp(u);
% 非线性求解器函数定义
function U = nonlinear_solver(E, I, x, F_app, u0)
% 这里简化描述非线性求解过程
% ...
% 假设迭代完成后的最终位移场为U
U = u0 + rand(size(u0)); % 仅作为示例,真实情况需要通过迭代求解
end
以上代码仅是一个框架性的示例,实际的大转动分析需要更复杂的非线性求解算法。
2.3 ANCF在大转动分析中的优势
2.3.1 ANCF处理大转动问题的原理
连续体杆件分析(ANCF)特别适合处理大转动和大变形问题,其基本原理是基于广义坐标系的描述,从而避免了传统有限元法中出现的剪切锁定和体积锁定问题。ANCF的元素通过其节点上的位移场来完全描述,这使得它能够捕捉连续体的任意变形,包括大转动和大变形。
ANCF的核心优势在于:
- 全局坐标描述 :ANCF采用全局坐标描述节点的位移,即使在大变形情况下也能保持高精度。
- 不依赖于单元形状 :元素的形状可以自由变化而不影响分析结果,这一点对于大转动尤其重要。
- 统一的理论框架 :ANCF提供了一个统一的框架来处理不同类型的连续体问题。
2.3.2 ANCF与其他分析方法的对比
ANCF方法相较于传统分析方法如有限差分法或有限体积法,在处理大转动问题方面表现出了明显的优越性。传统的分析方法往往在描述几何非线性问题时需要额外的假设和近似,这可能导致解的精度下降。
与基于拉格朗日描述的经典有限元方法相比,ANCF:
- 消除了锁定效应 :在大转动和大变形情况下,ANCF不受网格扭曲的影响。
- 提供了更通用的分析能力 :不依赖于特定元素类型或初始构形。
- 计算效率较高 :由于其采用的描述和积分策略,ANCF方法往往计算效率较高。
此外,ANCF在模拟复杂材料行为和结构交互作用方面也具有很好的潜力,这是传统方法难以达到的。
总结来说,ANCF是分析大转动现象的强大工具,尤其适用于那些在传统分析方法下难以精确模拟的复杂情况。通过其独特的理论框架和计算方法,ANCF为工程师和研究人员提供了一个强有力的工具来处理真实世界中的复杂工程问题。
3. MATLAB中ANCF梁模型实现
3.1 MATLAB环境下的ANCF编程基础
3.1.1 MATLAB概述及其在工程计算中的作用
MATLAB,全称为Matrix Laboratory,是一种高性能的数值计算环境和第四代编程语言。它广泛应用于数据分析、算法开发和工程设计。MATLAB的核心是矩阵运算,这使得它在工程计算领域具有天然的优势。工程师和科学家可以使用MATLAB的数学函数库来进行复杂的数值计算,使用其图形工具箱进行数据可视化。
在实现ANCF梁模型时,MATLAB可以提供多种矩阵操作的便利性,利用内置函数和算法库可以简化代码编写和调试过程。MATLAB还具备与其他编程语言和应用软件的接口,这使得用户可以很方便地将MATLAB与其他计算工具相结合,形成更加强大的计算环境。
3.1.2 ANCF相关MATLAB工具箱介绍
为了在MATLAB中有效地实现ANCF梁模型,可以使用或开发专门的工具箱。例如,针对连续体有限元分析的MatCONTFEA工具箱,它内置了一系列函数,用于创建连续体模型、进行前处理、求解以及后处理等任务。
MatCONTFEA工具箱中的函数可以对连续体结构进行自动网格划分,方便地定义材料属性和施加边界条件。求解器部分则可以利用已有的数值积分方法来获取模型在动态或静态加载下的响应。这些工具箱不仅提高了工作效率,还使得复杂分析的过程变得更加直观和易于管理。
3.2 模型定义与几何参数设置
3.2.1 梁模型的几何参数输入方法
在MATLAB中定义ANCF梁模型时,几何参数输入是第一步。这些参数通常包括但不限于梁的长度、截面形状、截面尺寸以及材料属性如弹性模量和泊松比。
为了输入这些参数,可以编写一个函数,该函数接收用户输入的几何参数,并将其存储在适当的数据结构中,例如结构体或数组。以下是一个示例代码,用于定义一个简单梁的几何参数:
function beam = defineBeam(length, width, height, E, nu)
% defineBeam 函数用于初始化一个梁的几何参数
% 输入参数:长度(length)、宽度(width)、高度(height)、弹性模量(E)、泊松比(nu)
beam.length = length;
beam.width = width;
beam.height = height;
beam.material = struct('E', E, 'nu', nu);
end
此代码段创建了一个新的结构体 beam ,它包含了梁的长度、宽度、高度以及材料属性。这个结构体将被用于后续的模型创建和分析过程。
3.2.2 模型材料属性的定义与赋值
定义材料属性是进行结构分析的重要一步,因为材料特性将直接影响结构的力学响应。在MATLAB中,可以为模型创建一个包含材料特性的结构体。例如,对于弹性材料,这包括弹性模量(E)和泊松比(ν)。
以下是如何在MATLAB中定义材料属性的示例:
% 创建一个材料属性结构体
materialProperties = struct('E', 210e9, 'nu', 0.3); % 弹性模量单位为Pa
% 将材料属性赋值给梁模型
beam.material = materialProperties;
在这里,我们定义了一个名为 materialProperties 的结构体,包含了给定的弹性模量和泊松比。然后,这个结构体被赋值给之前创建的梁模型。这样做可以确保所有相关参数都是集中管理的,方便在后续的分析过程中进行修改和访问。
3.3 ANCF元素构造及自由度分析
3.3.1 ANCF梁单元的构造过程
ANCF梁单元的构造涉及到建立数学模型和数值离散化的过程。在MATLAB中,这一过程可以分为几个步骤:定义单元节点、确定单元的局部坐标系、计算单元刚度矩阵以及施加单元边界条件。
以下是构造ANCF梁单元的一种方法:
function element = createANCFElement(node1, node2)
% createANCFElement 函数用于创建一个ANCF梁单元
% 输入参数:节点1(node1)和节点2(node2)
element = struct();
element.node1 = node1;
element.node2 = node2;
% 定义局部坐标系
element.localAxis = normalize(node2.position - node1.position);
% 计算刚度矩阵和质量矩阵(这里仅示意,需要具体实现)
% element.stiffnessMatrix = ...;
% element.massMatrix = ...;
end
这个函数创建了一个结构体 element ,它包括了两个节点 node1 和 node2 。局部坐标系是通过这两个节点的位置向量差来确定的。当然,实际情况下还需要计算单元的刚度矩阵和质量矩阵,这些可以通过有限元分析的理论公式来实现。
3.3.2 自由度的计算与处理
在连续体结构分析中,自由度指的是结构在各个方向上的独立运动能力。对于ANCF梁模型,每个节点会有多个自由度,例如,基于其位移和转动的描述,可能包括沿x、y、z轴的位移以及绕x、y、z轴的转动。
计算和处理自由度是实现有限元模型的关键步骤。在MATLAB中,可以创建一个函数来处理这些自由度。这通常涉及到以下过程:
- 初始化节点的自由度;
- 确定每个节点的自由度总数;
- 根据单元连接关系更新系统自由度。
以下是一个简化的示例代码,用于计算一个简单梁模型的自由度:
function dofs = calculateDOFs(beamElements)
% calculateDOFs 函数用于计算梁模型的自由度总数
% 输入参数:梁单元数组(beamElements)
numNodes = 2; % 假设每个梁单元由两个节点组成
dofsPerNode = 6; % 每个节点的自由度数,此处假设有6个自由度
totalNodes = length(beamElements) * numNodes; % 总节点数
% 初始化自由度数组
dofs = zeros(totalNodes * dofsPerNode, 1);
% 根据每个单元的节点信息填充自由度数组(示例)
for elementIndex = 1:length(beamElements)
element = beamElements{elementIndex};
node1Index = (elementIndex - 1) * numNodes + 1;
node2Index = node1Index + 1;
% 填充节点1的自由度(此处为示例,需要实现具体逻辑)
% dofs(node1Index * dofsPerNode + 1 : node1Index * dofsPerNode + dofsPerNode) = ...
% 填充节点2的自由度(此处为示例,需要实现具体逻辑)
% dofs(node2Index * dofsPerNode + 1 : node2Index * dofsPerNode + dofsPerNode) = ...
end
end
在这个例子中,我们首先定义了每个节点的自由度数量,然后通过遍历所有梁单元来计算总自由度。需要注意的是,这里只是给出了一个框架性的逻辑,具体的自由度赋值需要根据实际的单元类型和节点连接关系来确定。
通过以上代码的执行和进一步实现,我们可以获得整个模型的自由度信息,这对于后续的求解过程至关重要。在实际的有限元分析中,这一过程会涉及到复杂的矩阵运算和数据结构设计,以确保计算的准确性和效率。
4. 边界条件施加方法与荷载应用策略
4.1 边界条件的施加技术
在有限元分析中,边界条件是决定结构响应的关键因素。本节将详细介绍边界条件的分类、定义以及在MATLAB环境下的实现方法。边界条件包括但不限于固定支撑、滚动支撑和自由边界等。正确施加边界条件是保证仿真精度和结果真实性的前提。
4.1.1 边界条件的分类与定义
边界条件主要分为两大类:位移约束和力约束。位移约束又分为固定支撑(如完全固定、滑动固定)和自由支撑(如自由端、滚动支撑)。力约束则涉及到通过施加外部力、力矩、温度载荷等来模拟实际工况。
位移约束
固定支撑(如图4.1所示)是指限制某些或全部位移自由度的支撑方式,典型的如固定端支撑,它限制了所有位移和旋转的自由度。而自由端支撑则意味着该端点的所有位移自由度都是未被约束的。
图 4.1 位移约束示意图
力约束
力约束包括施加在模型上的集中力、力矩、分布力等,这些力可以是静态的,也可以是随时间变化的动态力。在某些情况下,还需考虑温度变化引起的热应力,这也可以作为一种边界条件施加。
4.1.2 不同边界条件在MATLAB中的实现方法
在MATLAB中,通过设置相应的矩阵来施加不同的边界条件。例如,对于位移约束,可以通过修改全局刚度矩阵和载荷向量来实现。MATLAB内置函数提供了便捷的边界条件施加方式。
代码示例与逻辑分析
% 假设K是全局刚度矩阵,F是全局载荷向量
% 假设我们要固定节点1和节点3的所有自由度
% 首先,建立一个索引数组,标识出固定节点的自由度
fixed_dofs = [1, 2, 3, 4]; % 假设每个节点有3个位移自由度和1个旋转自由度
% 接下来,我们需要修改K和F,以确保这些自由度的值为零
K(fixed_dofs, :) = 0;
K(:, fixed_dofs) = 0;
F(fixed_dofs) = 0;
% 最后,我们需要移除K和F中的对应行和列
K(fixed_dofs, :) = [];
K(:, fixed_dofs) = [];
F(fixed_dofs) = [];
在这个代码块中,我们首先创建了一个索引数组 fixed_dofs ,用来标识哪些自由度需要被固定。然后通过直接赋值为零,我们清除了这些自由度对应的刚度矩阵和载荷向量中的值。为了保持矩阵的维数不变,我们需要从矩阵中移除与固定自由度相对应的行和列。
在处理边界条件时,需要确保修改后的矩阵仍然满足静态平衡条件。这意味着对于每个受约束的自由度,其对应的力必须设置为零。上述代码通过清除矩阵中的对应项,满足了这一条件。
4.2 荷载的定义与应用
在连续体杆件分析(ANCF)模型中,正确地定义和应用荷载是至关重要的。本小节将介绍不同荷载类型的定义方法及其在MATLAB中的应用策略。
4.2.1 静载荷和动载荷的区分与应用
静载荷是指恒定不变或变化极其缓慢的外部作用力,这类荷载在分析时可以视为静态条件。而动载荷则是随时间变化的,它们会对结构产生动态效应。
静载荷的定义与应用
静载荷的定义相对简单,通常是通过直接赋值的方式施加到模型上。例如,将一个恒定大小的力施加到模型的某个部位,可以在MATLAB中如下实现:
% 假设F_static是全局静态载荷向量
% 假设我们想在节点2处施加一个大小为100N的垂直向上的力
F_static(4) = 100; % 假设节点2的垂直向上的自由度是第4个自由度
动载荷的定义与应用
动载荷的定义更为复杂,它需要考虑到时间因素。例如,在时间序列中的每个时间点都可能施加不同的力值。在MATLAB中可以通过创建时间向量和相应的载荷向量来实现动载荷的定义:
% 假设time_vector是时间向量,f_load是动载荷向量
time_vector = linspace(0, 1, 100); % 从0到1秒,共100个时间点
f_load = sin(time_vector); % 例如,使用正弦波定义随时间变化的力
% 动载荷通常需要与时间积分相结合,这部分将在后续章节详细介绍
在应用动态荷载时,需要对时间进行离散化处理,并在每个时间步长内计算和施加相应的荷载值。这通常需要借助数值积分方法来实现。
4.2.2 荷载时间历程的创建和应用
在进行动态分析时,荷载时间历程描述了荷载随时间的变化情况。创建合理的荷载时间历程是获得准确分析结果的关键。
荷载时间历程的创建
荷载时间历程可以通过实验数据、理论分析或标准荷载模型来创建。在MATLAB中,可以使用图表编辑器、脚本或函数来定义荷载时间历程。
% 假设我们有一个标准的正弦波荷载模型
time_vector = linspace(0, 10, 1000); % 从0到10秒,共1000个时间点
f_load = 100 * sin(time_vector); % 100N的振幅,周期为10秒
% 可视化荷载时间历程
plot(time_vector, f_load);
xlabel('Time (s)');
ylabel('Load (N)');
title('Load Time History');
荷载时间历程的应用
创建了荷载时间历程后,需要将其应用到有限元模型中。在MATLAB中,可以通过以下方式实现:
% 假设time_loads是一个结构体,其中包含了不同时间步长的载荷信息
for t = 1:length(time_vector)
% 在当前时间步长t,施加相应的荷载
apply_load_at_time(time_vector(t), f_load(t));
end
其中 apply_load_at_time 是一个假设的函数,它将在每个时间步长内根据时间向量和荷载向量来施加载荷。
4.3 施加荷载的数值方法
4.3.1 荷载时间步长的选取策略
选择合适的时间步长对于动态分析至关重要。时间步长太小会导致计算量巨大,而时间步长太大则可能导致计算结果不稳定或不精确。
时间步长的影响分析
时间步长的选择与模型的动态特性密切相关。通常需要根据模型的自然频率和阻尼比来估算合适的时间步长。对于具有高动态特性的模型,需要采用更小的时间步长。
% 假设模型的最高自然频率为fn
dt = 1/(20*fn); % 通常时间步长是最高频率周期的1/20
在这个例子中,我们选择的时间步长是模型最高自然频率周期的1/20。这个规则基于数值积分稳定性的考虑,确保了在动态分析中结果的准确性和稳定性。
4.3.2 荷载施加过程中的数值稳定性考量
在动态分析中,数值稳定性是确保结果正确性的重要因素。不稳定的数值积分会导致振荡或发散的结果,从而无法真实反映物理现象。
数值稳定的实现方法
为了保证数值稳定性,除了选择合适的时间步长外,还需要使用恰当的数值积分方法。显式积分方法如中心差分法在某些情况下可能会出现稳定性问题,而隐式积分方法如Newmark-β方法则通常更稳定。
% 假设我们使用Newmark-β方法进行数值积分
% 这里将省略Newmark-β方法的具体实现细节
在实际应用中,Newmark-β方法通过引入额外的积分参数来确保数值积分的稳定性。这些参数需要根据具体问题进行调整,以达到最优的数值稳定性和计算效率。
5. 动态和静态分析的数值求解
在前几章中,我们已经深入探讨了连续体杆件分析(ANCF)的理论基础及其在悬臂梁问题中的应用,并且通过MATLAB实现了具体的模型构建。现在,我们将重心转移到对模型进行动态和静态分析的数值求解方法上,这是将理论转化为可操作结果的关键步骤。
5.1 ANCF数值积分方法
5.1.1 常用的时间积分方案
数值积分是动态分析的基础,它允许我们通过离散的时间点来近似连续时间的物理行为。在ANCF中,常用的时间积分方案包括Newmark方法、HHT-α方法和Wilson-θ方法等。这些方法各有特点,但核心都是为了保证计算的稳定性和精度。例如,Newmark方法是一种隐式积分方案,它通过预测-校正步骤提供较高的稳定性和精度。
% Newmark积分方法示例代码
% 初始化参数
gamma = 0.5; % Newmark方法中的积分参数
beta = 0.25 * (gamma + 0.5)^2; % 与gamma参数相关联的另一个参数
dt = 0.01; % 时间步长
% 初始化向量和矩阵
u = zeros(nDOF, 1); % 位移向量
v = zeros(nDOF, 1); % 速度向量
a = zeros(nDOF, 1); % 加速度向量
% 时间积分主循环
for t = dt:dt:Tmax
% 计算有效刚度矩阵
k_eff = k + gamma/(beta*dt)*c + 1/(beta*dt^2)*m;
% 预测位移和速度
u_pred = u + dt*v + (0.5-beta)*dt^2*a;
v_pred = v + (1-gamma)*dt*a;
% 通过求解线性方程组得到校正加速度
a = k_eff \ (f(t) - c*v_pred - m*u_pred);
% 更新位移和速度
u = u_pred + beta*dt^2*a;
v = v_pred + gamma*dt*a;
end
5.1.2 积分方案的稳定性和精度比较
不同的时间积分方案在稳定性和精度上有所差异。选择合适的积分方案是保证仿真结果可靠性的关键。对于高频率动力学问题,如悬臂梁的大转动问题,选择合适的积分方案尤为重要。HHT-α方法和Wilson-θ方法在某些情况下可以提供比Newmark方法更好的数值表现,但这也取决于具体的结构特性和问题参数。
5.2 动态分析数值求解
5.2.1 动态问题的时间历程分析方法
动态分析涉及随时间变化的载荷或初始条件,通常会采用时间历程分析方法。在这一部分中,我们将展示如何通过离散时间步骤模拟动态行为,并且捕捉到系统响应的瞬态和稳态特征。
% 动态问题时间历程分析示例代码
% 初始化时间历程变量
tmax = 10; % 总模拟时间
n_steps = 1000; % 时间步数
t = linspace(0, tmax, n_steps); % 时间向量
% 进行动态分析
for i = 1:n_steps
% 更新外部载荷
f_ext = update_load(t(i));
% 执行时间积分
[u, v, a] = newmark_integrator(u, v, a, f_ext, dt);
% 记录结果,例如位移、速度、加速度
results(i, :) = [u; v; a];
end
% 动态响应后处理
function results = dynamic_response_postprocess(results, t)
% 结果可视化代码
% ...
end
5.2.2 动态响应的后处理技术
动态分析产生的数据量较大,需要通过后处理技术来分析和可视化。动态响应的后处理技术包括频域分析、傅里叶变换、时频分析等方法,能够帮助我们更好地理解系统的动态特性。
5.3 静态分析数值求解
5.3.1 静态问题的迭代求解策略
静态分析是指在没有随时间变化的载荷作用下求解结构响应的过程。这类问题通常通过迭代求解策略来处理,常见的迭代方法包括牛顿-拉夫森方法和修正牛顿-拉夫森方法等。这些方法的核心思想是利用线性化技术逼近非线性响应。
% 静态问题迭代求解示例代码
% 初始化静态分析变量
max_iter = 100; % 最大迭代次数
tolerance = 1e-6; % 收敛容忍度
u = zeros(nDOF, 1); % 初始位移向量
% 迭代求解循环
for iter = 1:max_iter
% 计算残差
residual = f(u) - k*u;
% 更新位移向量
u = u + update_displacement(residual);
% 检查收敛性
if norm(residual, 'inf') < tolerance
break;
end
end
5.3.2 收敛性判定和误差控制
收敛性判定和误差控制是迭代求解过程中的重要环节。通常,我们会设定一个容许误差范围,当迭代结果在容许误差范围内时,停止迭代。同时,采用合适的误差估计方法能够提供更为准确的收玫判定依据。
通过上述章节内容的介绍,我们不仅涵盖了ANCF在动态和静态分析中的数值求解方法,而且详细讨论了时间积分方案的选择、动态响应的后处理技术以及静态分析的迭代求解策略。读者通过这些内容的学习,将能更加深入地掌握ANCF在结构分析中的应用,并能够解决实际工程问题。接下来,我们将继续深入到结果后处理与结构评估的章节中去。
6. 结果后处理与结构评估
在完成了复杂的结构分析和数值求解之后,获得的海量数据需要经过有效的后处理才能转化为有价值的结构评估信息。本章将探讨如何将分析结果进行可视化处理,如何评估结构的性能,以及通过案例研究来加深对ANCF后处理和结构评估的理解。
6.1 结果数据的可视化技术
在复杂的工程分析中,结果数据的可视化技术对于理解模型的行为和性能至关重要。通过图形展示,可以更直观地识别结构的弱点和潜在问题。
6.1.1 结果数据的处理和图形展示方法
为了使结果数据可视化,首先需要对数据进行处理。这通常包括数据的筛选、过滤和转换等步骤。在MATLAB中,可以通过内置的绘图函数或者工具箱来实现数据的图形展示。例如,使用 plot 函数可以绘制位移随时间的变化,而 contour 函数可以用来显示应力分布。
% 假设我们有一组位移数据displacements和对应的时间向量time
time = 0:0.01:1; % 时间向量
displacements = sin(time); % 示例位移数据
% 绘制位移时间曲线
figure;
plot(time, displacements);
xlabel('Time');
ylabel('Displacement');
title('Displacement vs Time');
% 假设有一组应力数据stresses和位置向量locations
locations = linspace(0, 1, 100); % 位置向量
stresses = locations.^2; % 示例应力数据
% 绘制应力分布图
figure;
plot(locations, stresses);
xlabel('Location');
ylabel('Stress');
title('Stress Distribution Along the Beam');
6.1.2 动态和静态响应的对比分析
在动态和静态分析中,结构的响应可能会有很大的不同。通过对比动态和静态响应,可以识别在动态载荷下的非线性特征和可能的振动现象。这通常涉及到在不同时间点的响应对比,或者不同载荷水平下的对比。
6.2 结构性能评估指标
评估结构性能是一个多维度的过程,涉及到多个评估指标的综合考量。通过这些指标,工程师可以对结构的整体性能和安全性作出判断。
6.2.1 常用的结构性能评估指标
结构性能评估指标包括但不限于最大位移、应力水平、疲劳寿命、损伤指数等。这些指标有助于判断结构在设计载荷下的行为是否满足预期。
6.2.2 结构安全性和耐久性的评估方法
评估结构的安全性和耐久性需要考虑多种因素,如材料老化、环境影响、载荷历史等。通常需要结合数值分析结果和工程经验来作出综合评价。
6.3 案例研究与实操演练
通过具体的案例来实践理论知识是深入理解后处理和结构评估的最好方法。下面将通过一个简化的案例来演示如何进行结果的后处理和结构评估。
6.3.1 典型案例的分析过程和结果展示
假设我们分析了一个悬臂梁在静态载荷下的行为,并得到了位移和应力数据。我们将通过MATLAB的可视化技术展示这些结果,并根据结构性能评估指标来进行初步的安全性评估。
6.3.2 常见问题的诊断及解决方案讨论
在结构分析和评估过程中可能会遇到的问题包括数值不稳定性、收敛困难等。对于这些问题,将讨论一些诊断和解决方案,帮助读者在实际工作中遇到问题时进行有效应对。
通过上述内容,本章提供了结构分析后处理和评估的一系列方法和策略,旨在帮助读者能够更好地理解和应用ANCF技术进行工程结构的深入分析和评估。
简介:本源码集为使用MATLAB进行大转角ANCF梁分析提供支持,特别关注于悬臂梁这类工程中常见结构。ANCF是一种用于模拟非线性动力学问题的先进有限元方法,允许节点在非线性空间中进行平动与旋转,适用于大转动和大变形。通过详细步骤,包括模型定义、元素构造、边界条件施加、荷载应用、求解过程以及结果后处理,ANCF梁模型能精确模拟悬臂梁的行为。源码库的使用和学习,有助于深入理解ANCF方法及其在MATLAB环境中的应用。
更多推荐


 12
12 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)