
盘点|浙江大学高飞 2025 下半年重磅研究成果一览
针对传统栅格地图易丢失细小障碍物信息的问题,团队提出了一种基于机载3D激光雷达感知与Sim-to-Real强化学习的端到端无人机自主飞行框架,设计了一种任务相关的稀疏感知表征,在大幅压缩数据量的同时保留了对电线等微小目标的敏锐捕捉能力。(BM-MCTS)算法,能在复杂的未知环境中,根据实时的能量与时间,动态规划出最优的“飞行-地面”切换策略。实测显示,该系统能在有限的机载算力下实现10Hz的实时重

「 11篇重磅论文解读 」
目录
Any-shape Real-time Replanning via Swept Volume SDF
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Robots in Unstructured Environments
Flying on Point Clouds with Reinforcement Learning
RE-Formation: Resilient and Efficient Formation Planning in Large-Scale Distributed Aerial Swarms
Autonomous Exploration With Terrestrial-Aerial Bimodal Vehicles
Dynamically Feasible Trajectory Generation With Optimization-Embedded Networks for Autonomous Flight
Automatic Generation of Aerobatic Flight in Complex Environments via Diffusion Models
Shape-Adaptive Planning and Control for a Deformable Quadrotor
FLOAT Drone: A Fully-actuated Coaxial Aerial Robot for Close-Proximity Operations
Flying in Clutter on Monocular RGB by Learning in 3D Radiance Fields with Domain Adaptation
时序更替,2025已至尾声。
回顾这一年,浙江大学高飞老师团队在无人机领域持续深耕,其研究展现出一条清晰的演进脉络。
在2025年上半年,团队的工作(如分层规划系统与自主特技飞行框架)着重于“解锁”机器人在复杂环境中的极限单体性能;进入下半年,其研究蓝图则进一步拓宽,呈现出 “从个体到系统、从通用到专精、从理论到闭环” 的全面跨越。
为方便大家回顾其研究脉络,以下是团队2025年上半年的成果盘点:盘点 | 浙江大学高飞团队2025上半年无人机硬核成果
团队的研究从单体无人机导航,深化拓展至异构机器人协同、集群弹性编队以及陆空跨域系统等前沿方向,并致力于构建感知、决策与控制一体化的全栈技术闭环。
基于这一脉络,我们精选出团队2025年下半年的11篇核心工作,进行详细解读。
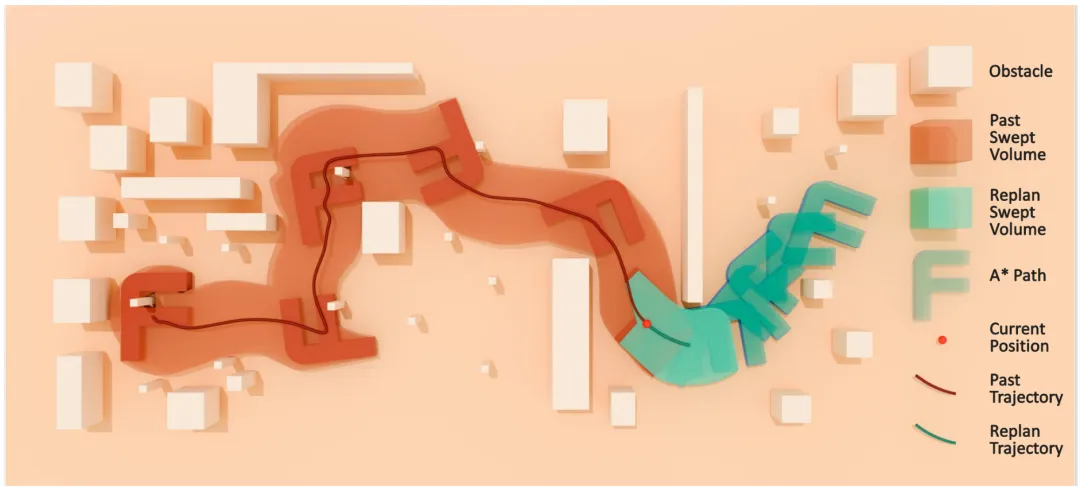
Any-shape Real-time Replanning via Swept Volume SDF
顶会/顶刊:IROS
工作亮点: 针对复杂构型在狭窄环境中的避障问题,团队提出了一种基于扫描体符号距离场(SVSDF)的实时重规划框架。该方法通过改进的数值计算实现了对运动包络的精确建模与连续碰撞检测,并利用B样条的局部支撑特性优化轨迹,彻底摒弃了传统的几何简化策略,比现有SOTA方法快约17倍。实测显示,该系统能在有限的机载算力下实现10Hz的实时重规划,实现了敏捷性、安全性和实时性的平衡,为非凸异构机器人在非结构化环境中的敏捷避障提供了严密的安全保障。
论文主页:https://ieeexplore.ieee.org/document/11246875
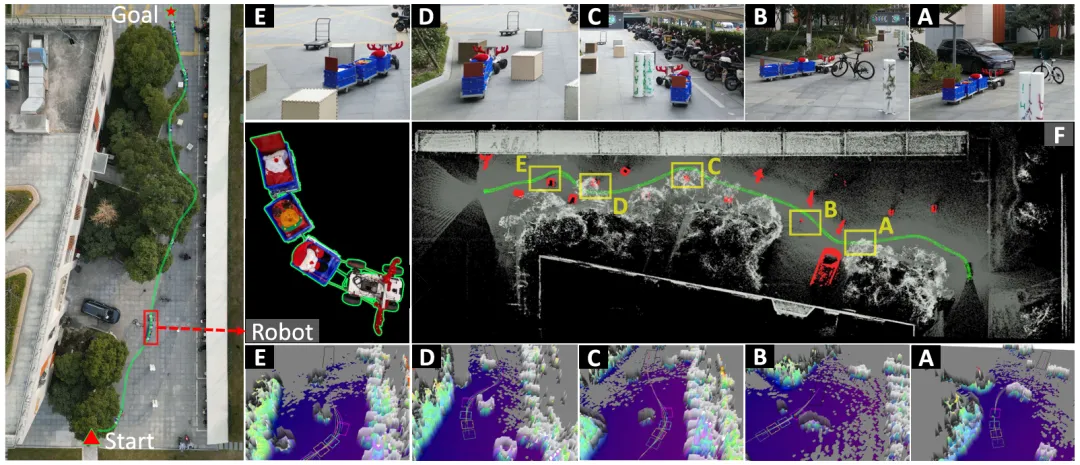
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Robots in Unstructured Environments
顶会/顶刊:IEEE TASE
工作亮点: 针对拖挂系统非完整约束强、构型易变的特点,团队提出了一种基于“松弛弧长”的轨迹表征法,有效解决了微分平坦带来的奇异性问题。该框架利用SDF在连续空间直接进行轨迹变形,摆脱了对初值的强依赖,显著提升了在非结构化狭窄环境中的规划效率。
论文主页:https://ieeexplore.ieee.org/abstract/document/11159493
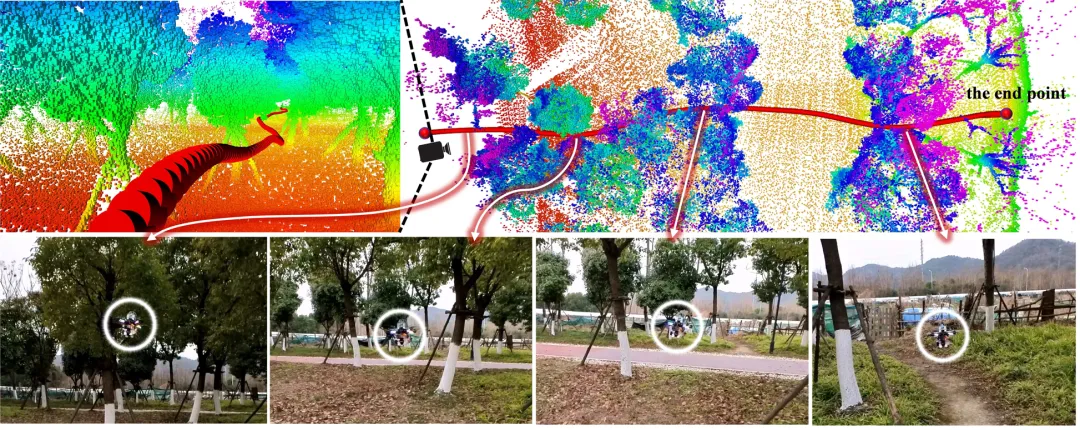
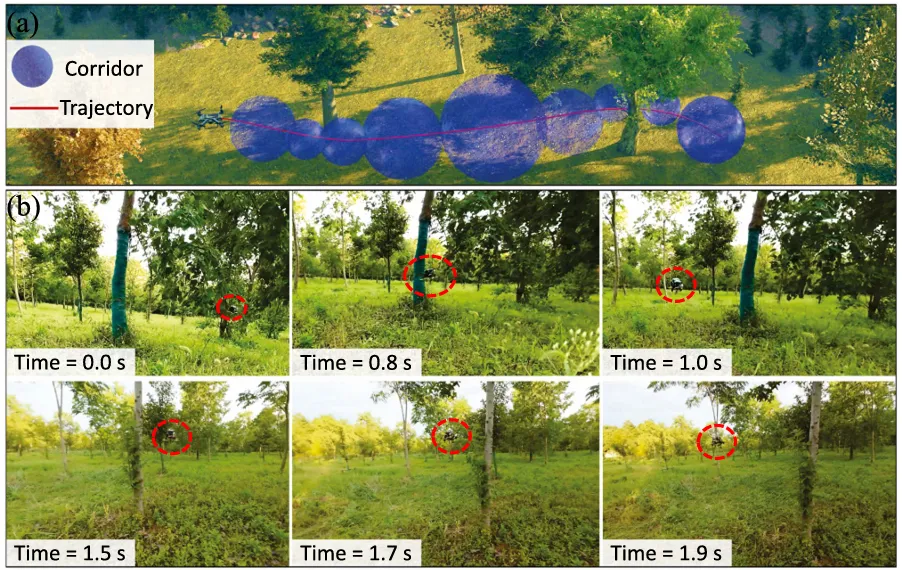
Flying on Point Clouds with Reinforcement Learning
顶会/顶刊:IROS
工作亮点:针对传统栅格地图易丢失细小障碍物信息的问题,团队提出了一种基于机载3D激光雷达感知与Sim-to-Real强化学习的端到端无人机自主飞行框架,设计了一种任务相关的稀疏感知表征,在大幅压缩数据量的同时保留了对电线等微小目标的敏锐捕捉能力。该系统摒弃了传统的“建图-规划-控制”分层架构,直接实现了从点云到控制指令的50Hz实时响应。实机实验中,搭载该系统的微型四旋翼无人机在无外部定位辅助的情况下,成功实现了在复杂丛林和包含细微障碍物的室内环境中的敏捷穿越。
论文主页:https://ieeexplore.ieee.org/document/11246821
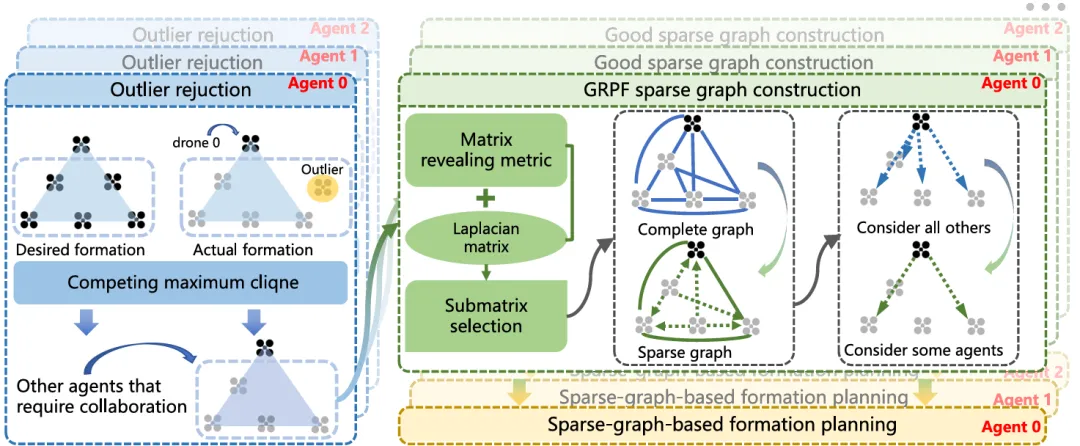
RE-Formation: Resilient and Efficient Formation Planning in Large-Scale Distributed Aerial Swarms
顶会/顶刊:IEEE TASE
推荐理由: 针对大规模编队计算量大且易受单体故障影响的痛点,团队提出了一种基于全局刚性特征保持(GRPF)稀疏图的规划框架。该方法通过子矩阵选择显著降低了计算复杂度,并创新性地引入最大团近似算法来剔除异常节点,赋予了系统极强的弹性与自愈能力。实验成功实现了百架无人机的实时编队与避障,相比SOTA方法计算效率提升近一个数量级,为大规模分布式集群的实际部署提供了坚实的理论支撑。
论文主页:https://ieeexplore.ieee.org/abstract/document/11143553
Autonomous Exploration With Terrestrial-Aerial Bimodal Vehicles
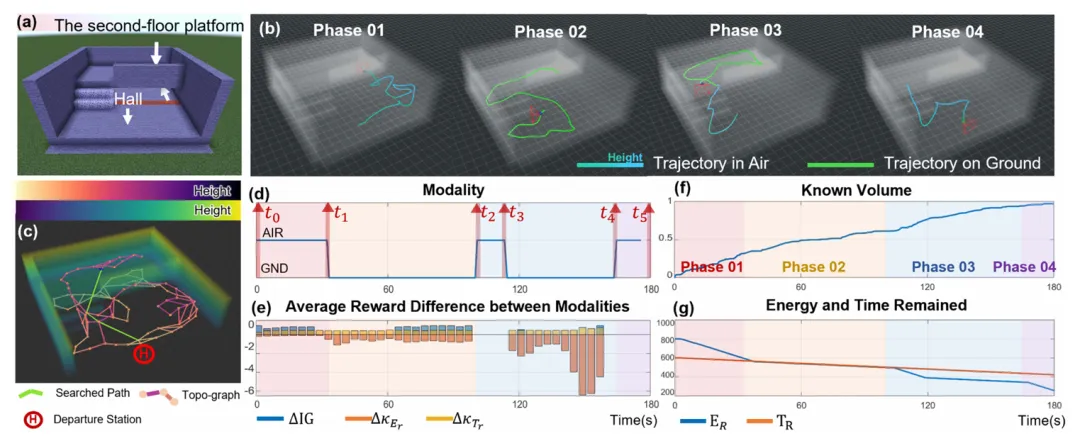
顶会/顶刊:RAL
工作亮点:针对实际勘察任务中严苛的能量与时间约束,团队提出了一套分层探索框架。该研究的核心在于引入了双模态蒙特卡洛树搜索(BM-MCTS)算法,能在复杂的未知环境中,根据实时的能量与时间,动态规划出最优的“飞行-地面”切换策略。这种设计不仅大幅延长了作业半径,还保证了在受限的时间内获取最大化的环境信息。地下车库等真实场景的成功应用,证明了其在长航时、跨地形自主勘察任务中的独特优势。
论文主页:https://ieeexplore.ieee.org/abstract/document/11122320
Dynamically Feasible Trajectory Generation With Optimization-Embedded Networks for Autonomous Flight
顶会/顶刊:RAL
工作亮点:针对端到端导航中轨迹动力学可行性差的问题,团队提出了一种嵌入可微优化层的神经网络架构。这个架构既保留了学习方法的高效性,又从理论上保证了飞行的物理可行性与平滑度。实测显示,该系统能支持无人机在复杂丛林中进行极速穿越,计算耗时仅毫秒级。该方法在成功率、轨迹平滑度和约束满足度上均优于现有的传统方法和纯学习方法。
论文主页:https://ieeexplore.ieee.org/abstract/document/11106766
Automatic Generation of Aerobatic Flight in Complex Environments via Diffusion Models
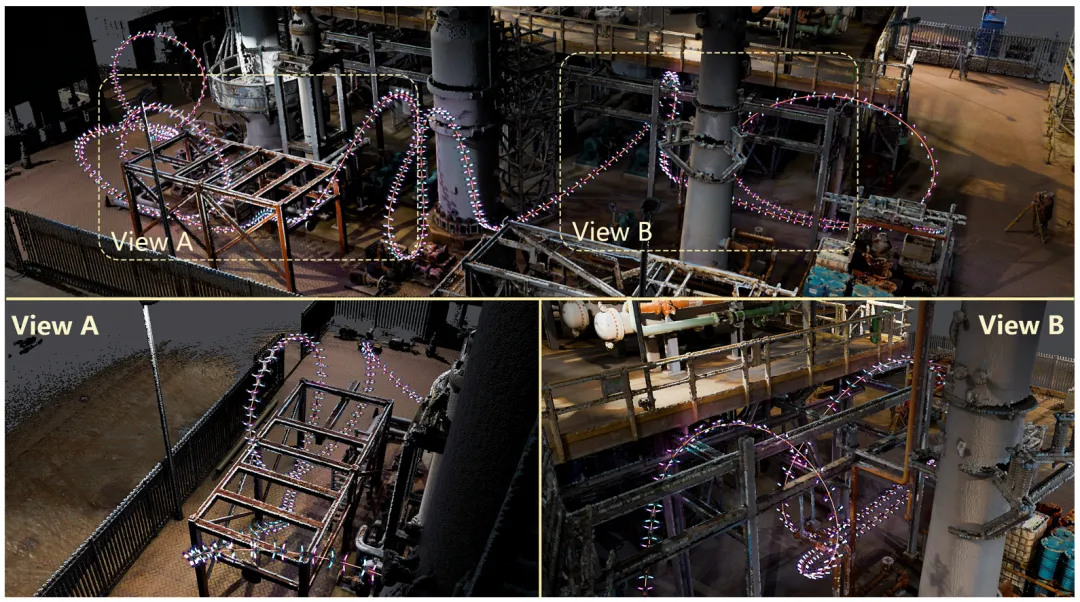
顶会/顶刊:IROS
工作亮点:针对人工设计高难度轨迹的问题,团队提出了一种基于扩散模型(Diffusion Models)的自动轨迹生成框架,并提出了“特技动作基元”概念,将复杂机动分解为可拼接的标准化模块。该框架通过学习基元及其转移规律,支持用户利用目标点和动作语义进行可控生成。结合分类器引导的避障策略与分层时空轨迹优化后处理,该系统有效保证了生成轨迹在障碍环境中的安全性与动力学可行性。实机实验展示了其在工业厂房等复杂场景中自动生成连续特技动作的工程潜力。
论文主页:https://ieeexplore.ieee.org/document/11246023
Shape-Adaptive Planning and Control for a Deformable Quadrotor
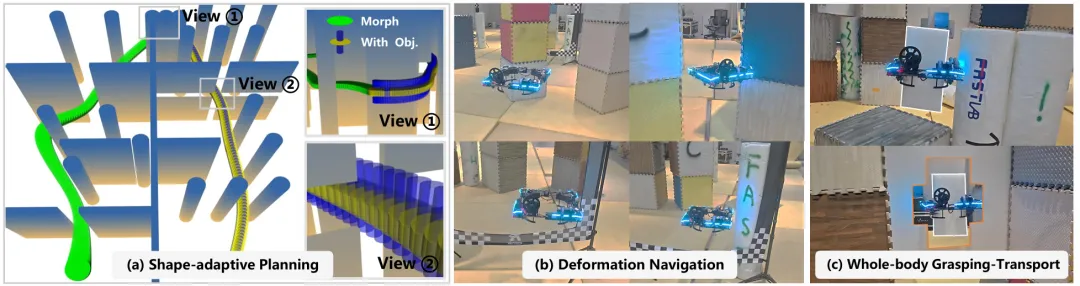
顶会/顶刊:IROS
工作亮点:针对四旋翼在狭窄空间受限的问题,团队提出了一套形状自适应的规划与控制框架。该方法通过联合优化飞行轨迹与机身形态,实现了在受限环境中的灵活穿梭。配合引入干扰观测与力矩补偿的增强型控制器,有效克服了结构变形带来的动力学模型失配问题,将轨迹跟踪误差降低了37.3%。实机演示的窄缝穿越与全身物体抓取,为特种环境下的无人机作业提供了的解决方案。
论文主页:https://ieeexplore.ieee.org/document/11245898
FLOAT Drone: A Fully-actuated Coaxial Aerial Robot for Close-Proximity Operations

顶会/顶刊:IROS
工作亮点:针对传统全驱动无人机体积大且气流干扰强的问题,团队提出了一种结合共轴双旋翼与舵面控制的新型全驱动构型(FLOAT Drone)。该设计利用舵面偏转产生水平力,在实现6-DoF全驱动的同时,有效抑制了侧向下洗气流对操作对象的干扰,并保持了机身的极致紧凑。配合支持全/欠驱动模式无缝切换的分层控制器,该机器人在浇花、窄缝穿越及拉窗帘等实验中展现了卓越的稳定性与作业精度,为复杂环境下的精细化空中物理交互提供了全新的解决方案。
论文主页:https://ieeexplore.ieee.org/document/11245967
Flying in Clutter on Monocular RGB by Learning in 3D Radiance Fields with Domain Adaptation
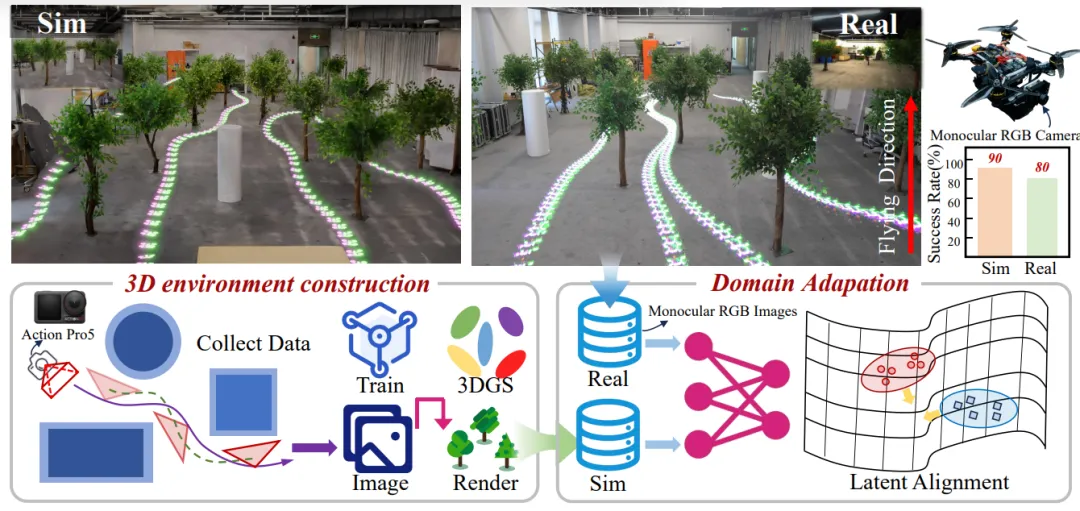
工作亮点:创新性地将隐式神经场景表示与域自适应学习相结合,以解决单目视觉无人机在未知杂乱环境中导航的泛化难题。具体而言,研究团队提出了一个能够从单目RGB视频在线构建3D神经辐射场的框架,以此生成精确的几何场景表示,替代了传统的显式地图。同时,通过域自适应技术,系统成功地将从模拟数据中学习的飞行策略,迁移并适应到外观、光照复杂的真实世界环境中。最终,该方法仅凭一个普通单目相机,就使无人机在多种未经过预先建模的室内杂乱场景中,实现了鲁棒且安全的自主飞行,显著提升了轻量化视觉导航系统的实用性与适应性。
论文主页:https://arxiv.org/pdf/2512.17349v1
拓展阅读:高飞团队新作:无需深度传感器!只靠一只RGB摄像头,实现复杂场景零样本飞行迁移
VLA-AN: An Efficient and OnboardVision-Language-Action Framework for Aerial Navigation in Complex Environments
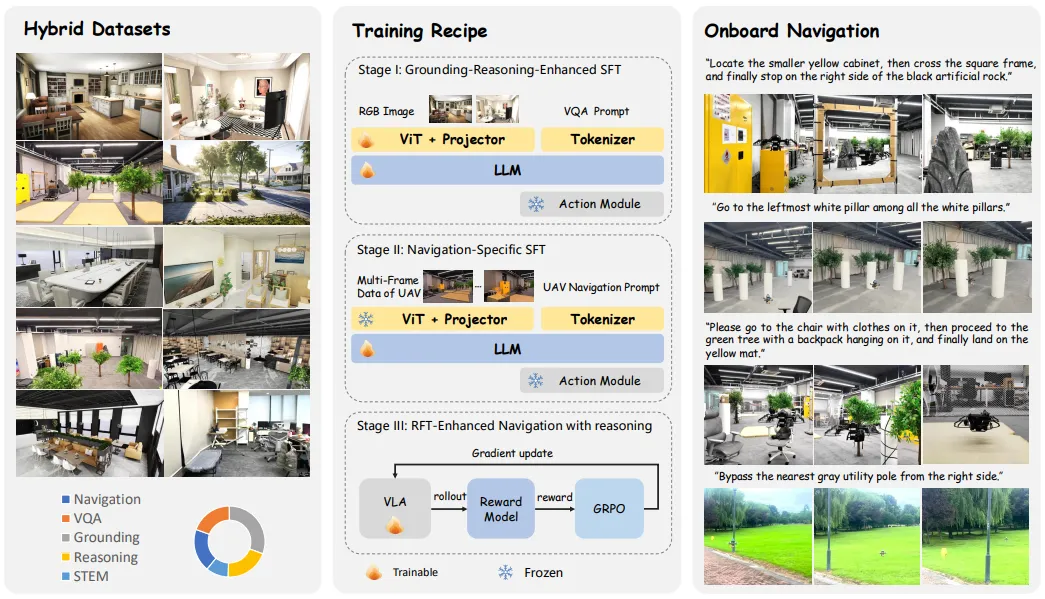
工作亮点:针对无人机在复杂环境中“看得懂指令但反应慢、易碰撞”的核心难题,团队提出的VLA-AN框架实现了一个从数据、训练到安全与部署的完整技术闭环。该工作创新性地利用3D高斯泼溅技术构建了高保真、大规模的第一人称视角导航数据集,有效弥合了仿真与真实飞行数据间的鸿沟;并设计了渐进式三阶段训练框架,系统性提升了模型从场景理解、核心飞行技能到复杂长时序决策的能力。尤为关键的是,它摒弃了存在随机碰撞风险的生成式动作模型,转而采用耦合几何安全校正的轻量化实时动作模块,确保在狭窄空间中的动作确定性。通过全链路深度优化,最终在机载算力有限的平台上实现了2-3 Hz的实时推理频率与超过90%的平均任务成功率,为轻量化无人机实现真正可靠、可部署的“视觉-语言-动作”自主导航提供了实用化解决方案。
论文主页:https://arxiv.org/pdf/2512.15258
拓展阅读:成功率98.1%!浙大高飞团队最新:VLA-AN构建“数据+安全+算力”闭环,实现真·实时导航
考虑到部分同仁不方便下载,我们已将上述论文打包整理好,关注公众号【深蓝AI】,私信1231即可免费领取。
结语
这些工作并非孤立的技术点,而是共同构成了一套面向真实世界的方案,无论是异构平台的跨域协作,还是任意形状机器人的实时避障,都验证了在复杂动力学约束下实现高动态、强鲁棒自主飞行的可行性。这些成果为机器人技术从单一场景向更广泛、更开放环境的实际部署提供了严谨的理论依据与工程范式。
更多推荐
 16
16 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)