
YOLOv1、YOLOv2、YOLOv3目标检测算法原理与实战第十二天|YOLOv3理论
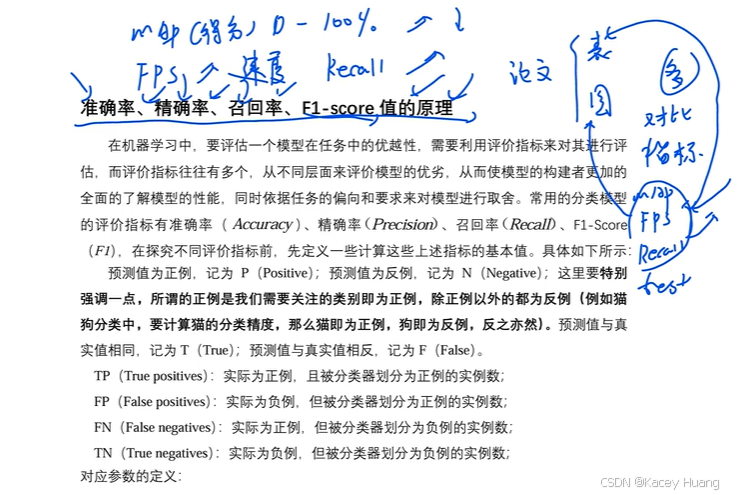
正例P:需要关注的类别反例N:初正例以外都为反例TP(True positives):实际为正例,且被分类器划分为正例的实例数;FP(False positives):实际为负例,但被分类器划分为正例的实例数;FN(False negatives):实际为正例,但被分类器划分为负例的实例数;TN(True negatives):实际为负例,但被分类器划分为负例的实例数;准确率:精确率(查准率):找
1.学习哔哩哔哩《YOLOv1、YOLOv2、YOLOv3目标检测算法原理与实战》
炮哥带你学视频链接
第4章 YOLOv3目标检测算法原理
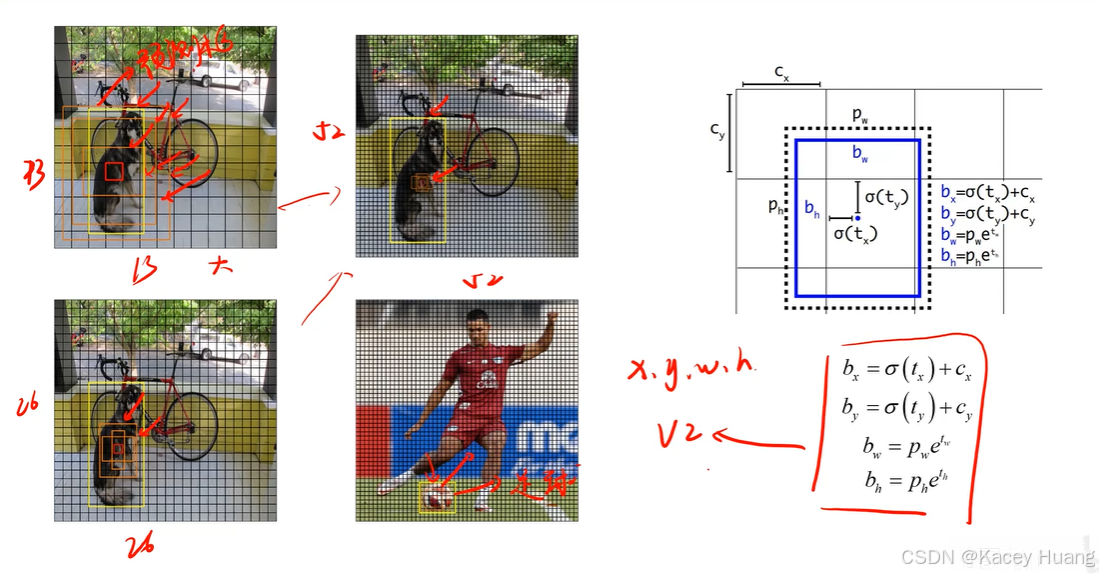
4.1 YOLOv3算法原理先导与背景
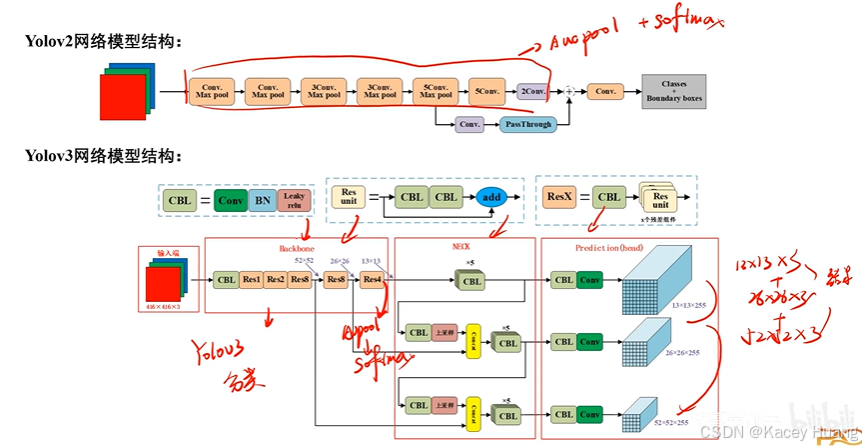
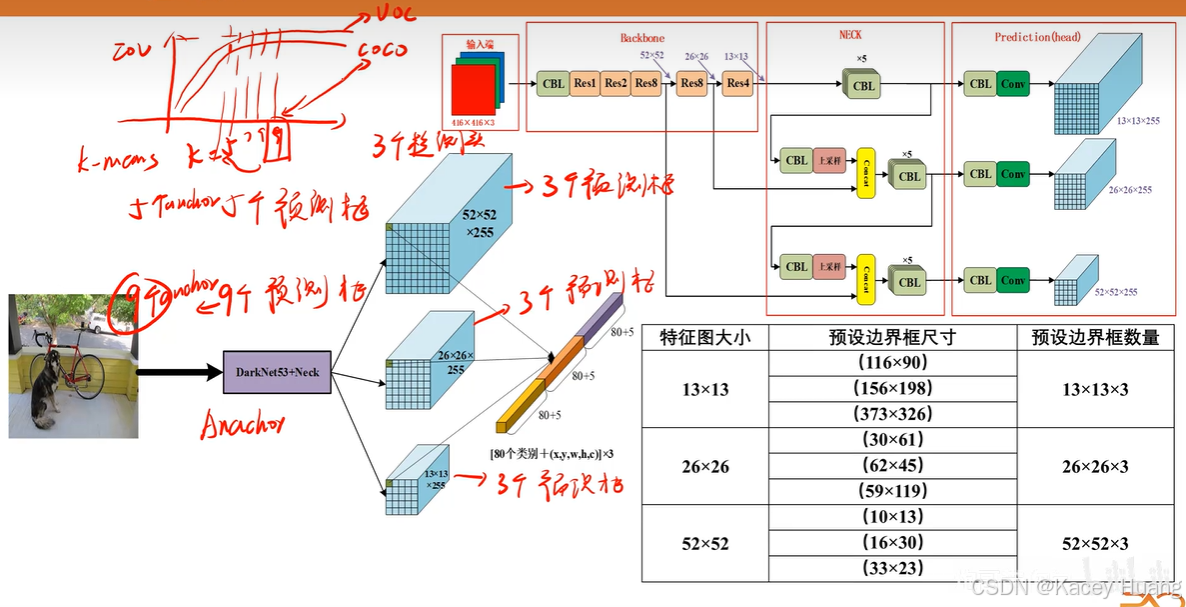
4.2 YOLOv3网络整体结构
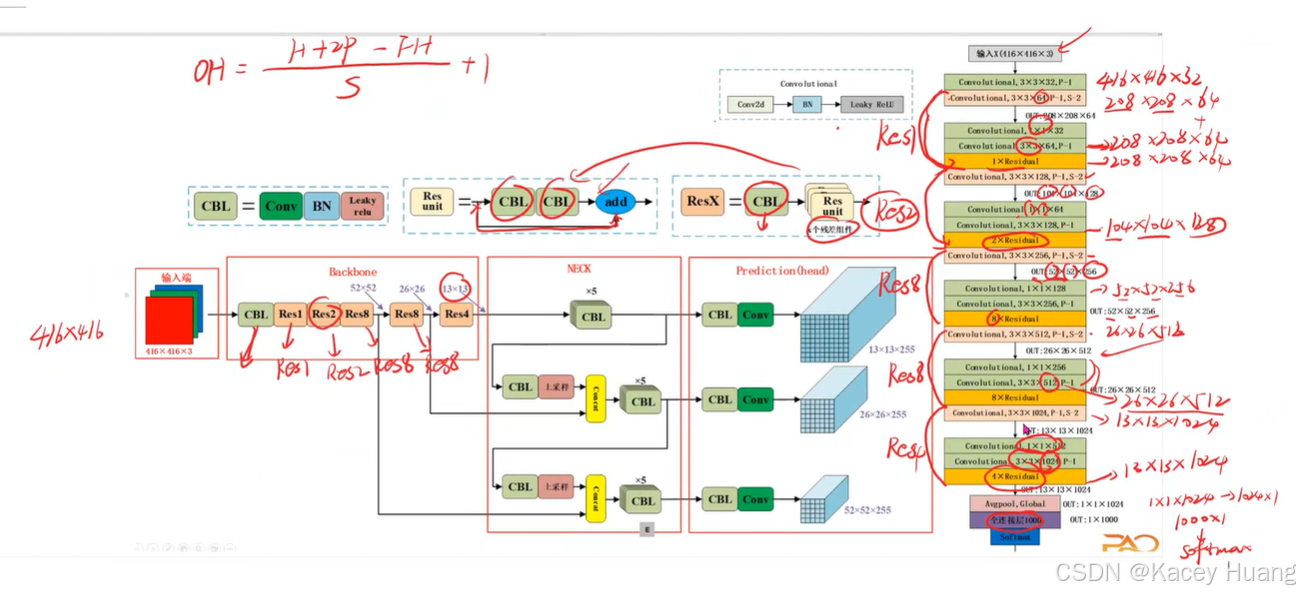
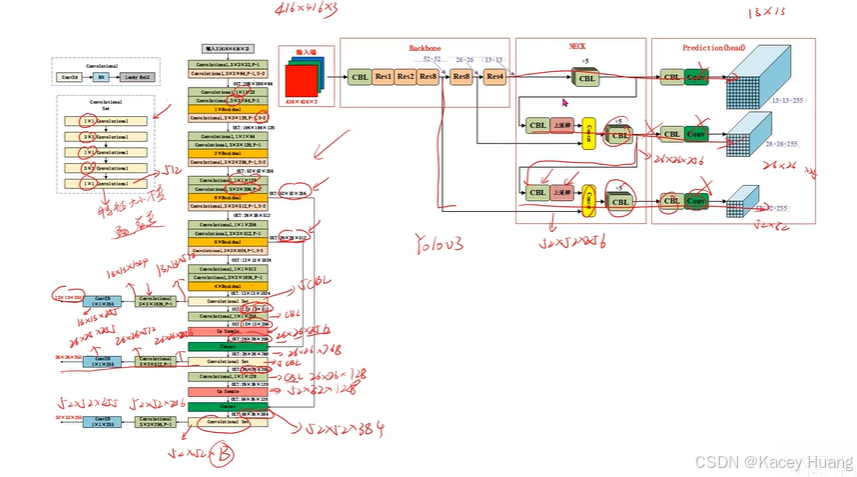
4.3 YOLOv3主干网络架构及其分类模型参数
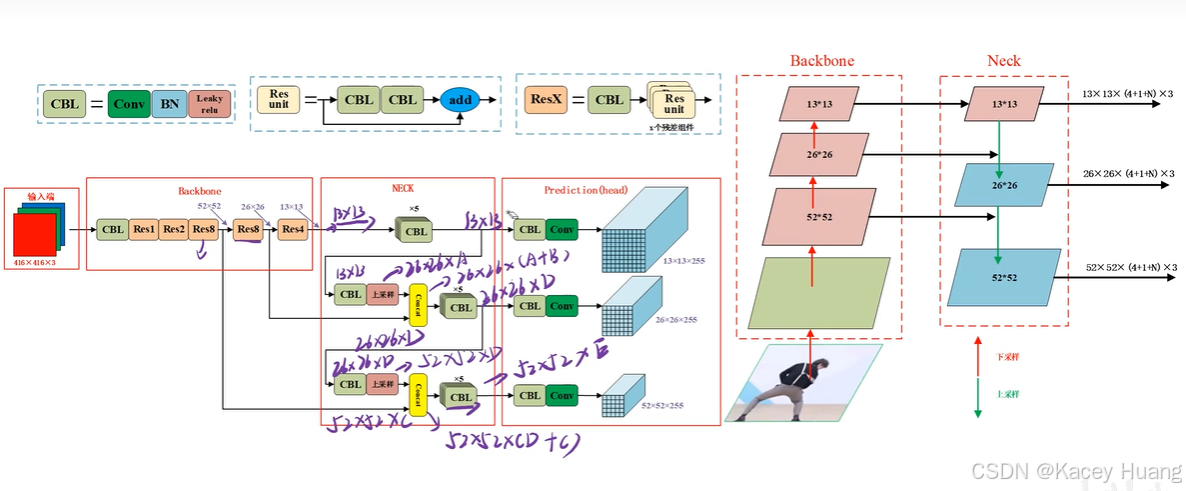
4.4 YOLOv3图像金字塔(颈部)
下采样:减少特征图的尺寸,增加通道数
上采样:增加特征图的尺寸
颈部:特征融合。26x26包含13x13的信息,52x52包含13x13和26x26的信息
4.5 YOLOv3网络头部
CBL:再进行特征提取
Conv:希望输出255个通道,255=3*(5+80)
52x52检测小物体
26x26检测中物体
13x13检测大物体
4.6 YOLOv3检测模型参数详解
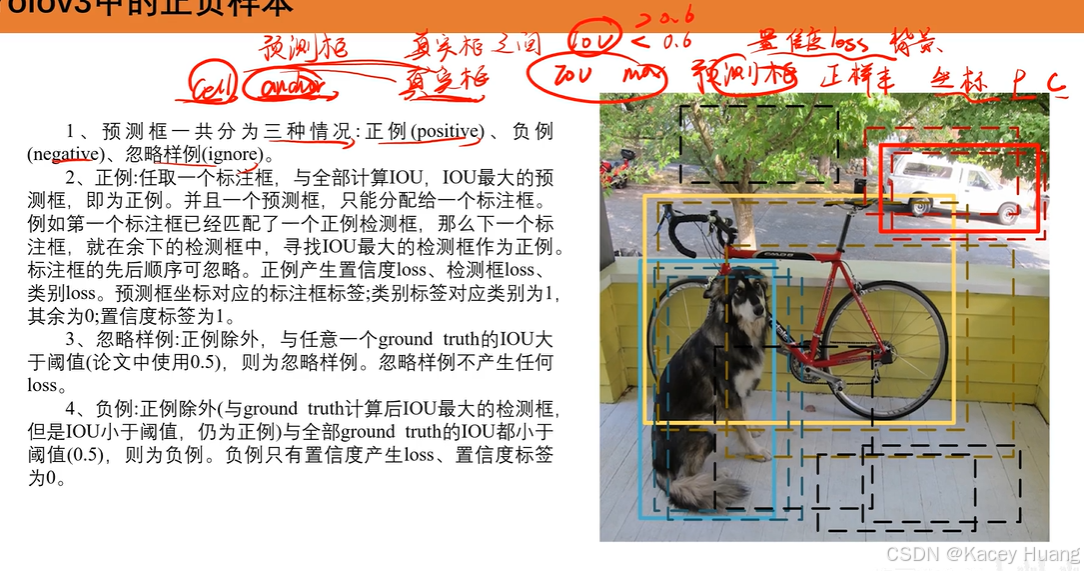
4.7 YOLOv3正负样本
4.8 YOLOv3损失函数
正样本:坐标、类别、置信度
负样本:置信度
总公式:
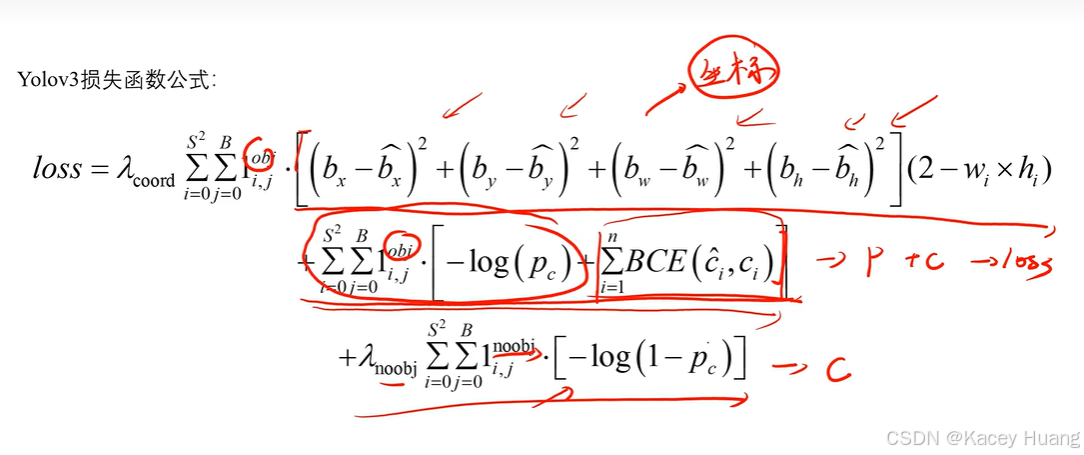
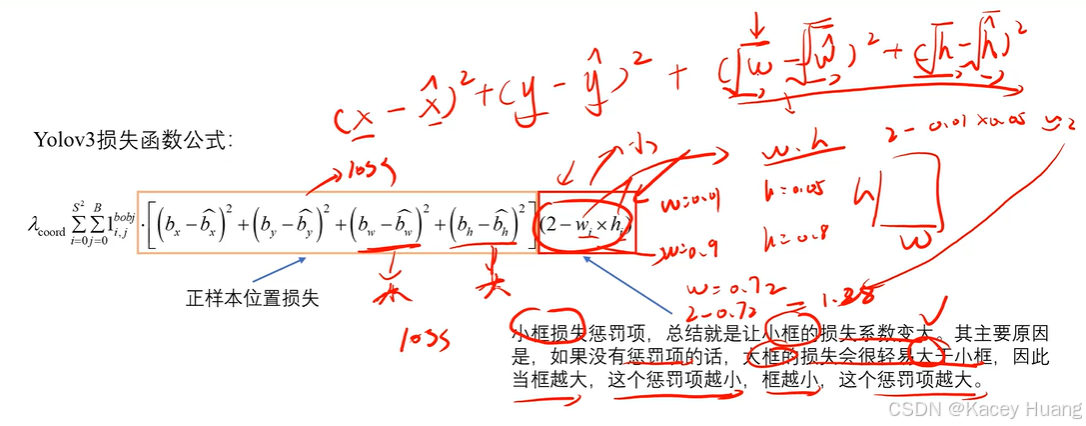
坐标损失:
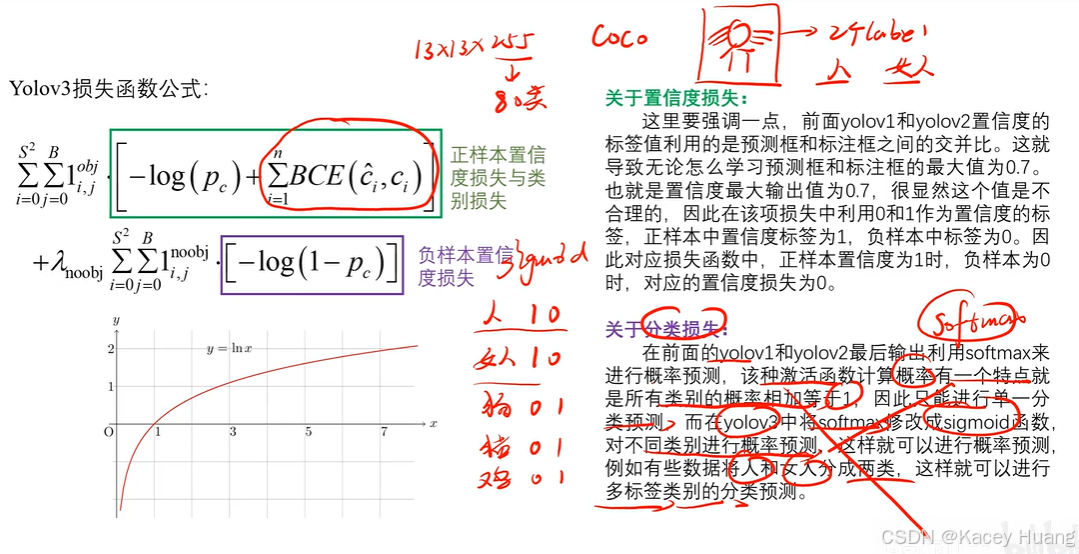
置信度、概率损失:
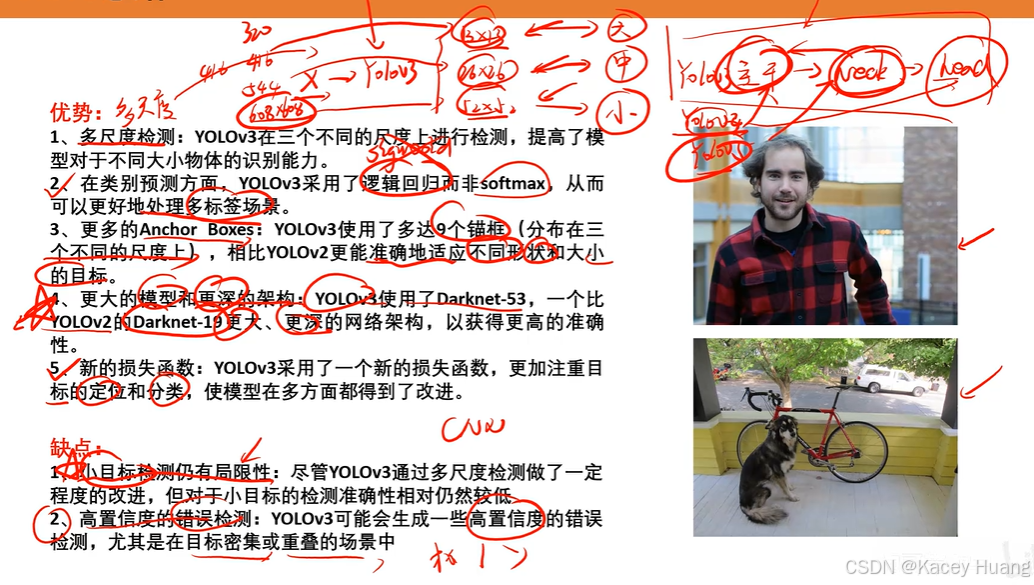
4.9 YOLOv3总结
4.10 评价指标先导
4.11 4个评价指标定义
正例P:需要关注的类别
反例N:初正例以外都为反例
TP(True positives):实际为正例,且被分类器划分为正例的实例数;
FP(False positives):实际为负例,但被分类器划分为正例的实例数;
FN(False negatives):实际为正例,但被分类器划分为负例的实例数;
TN(True negatives):实际为负例,但被分类器划分为负例的实例数;
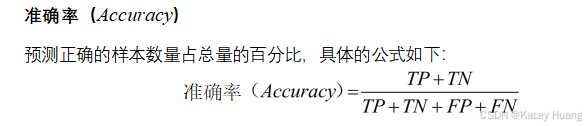
准确率:
精确率(查准率):找的准不准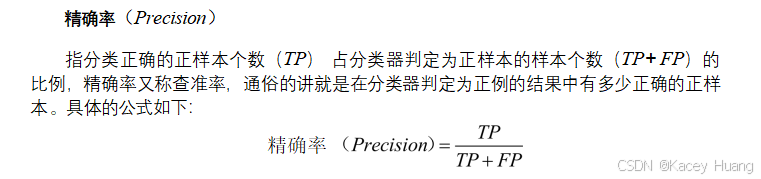
召回率:找的全不全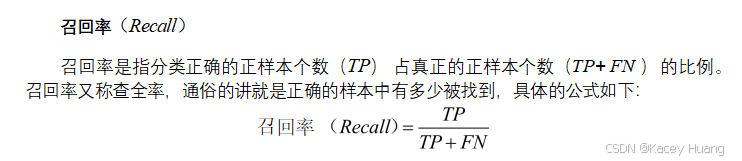
F1-Score: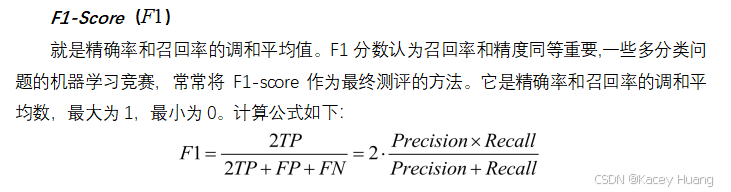
4.12 分类评价指标计算案例
二分类案例:有肿瘤是正例,无肿瘤是反例
混淆矩阵: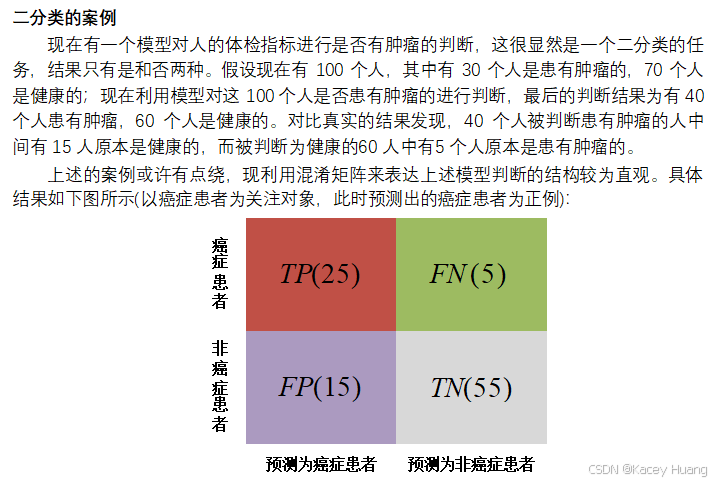
计算: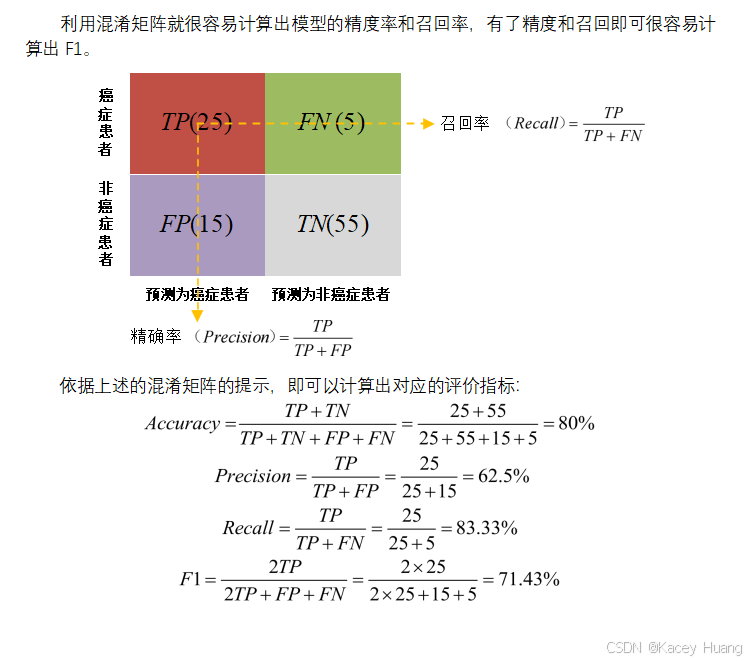
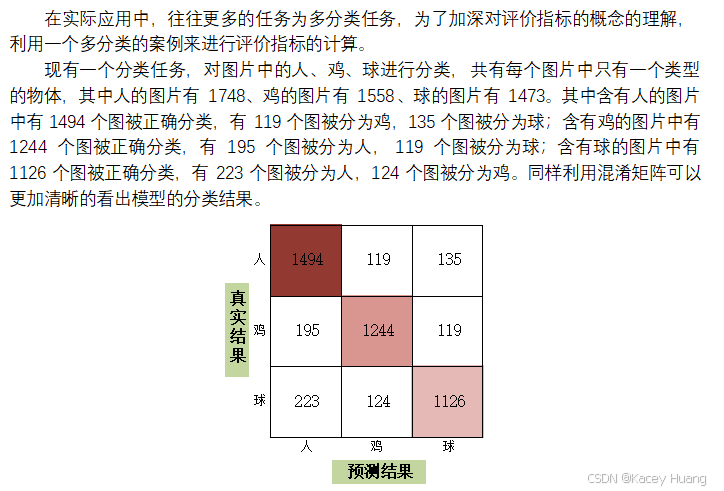
多分类案例:图片分类
混淆矩阵:
计算: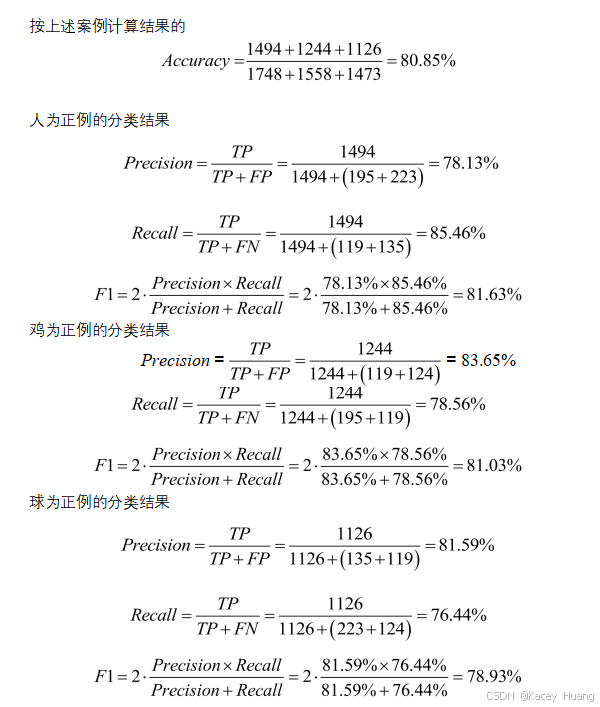
4.13 目标检测评价指标前置知识复习
交并比IOU: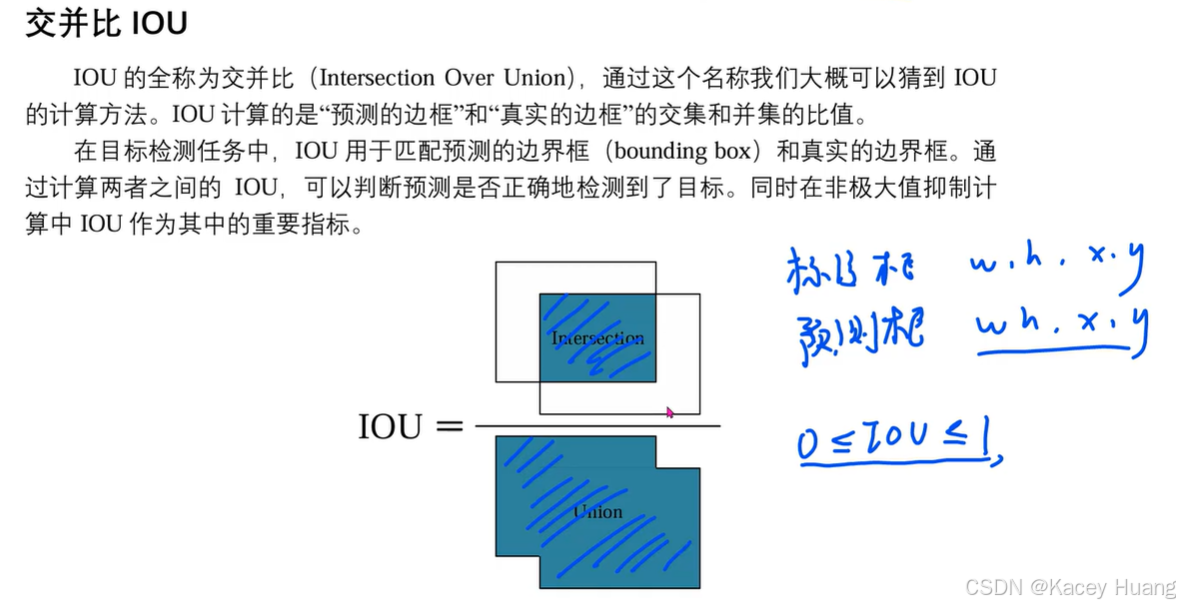
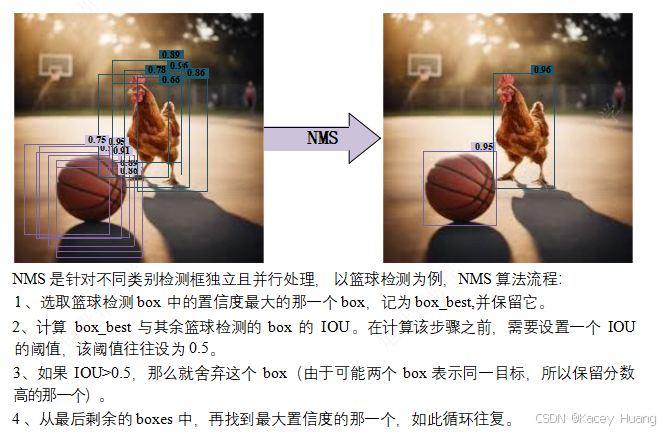
置信度和非极大值抑制NMS: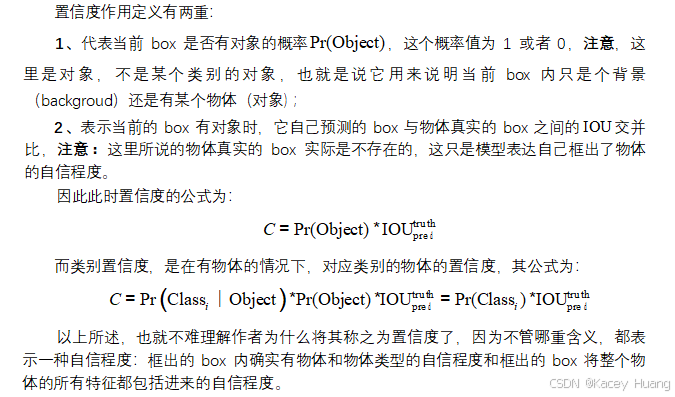
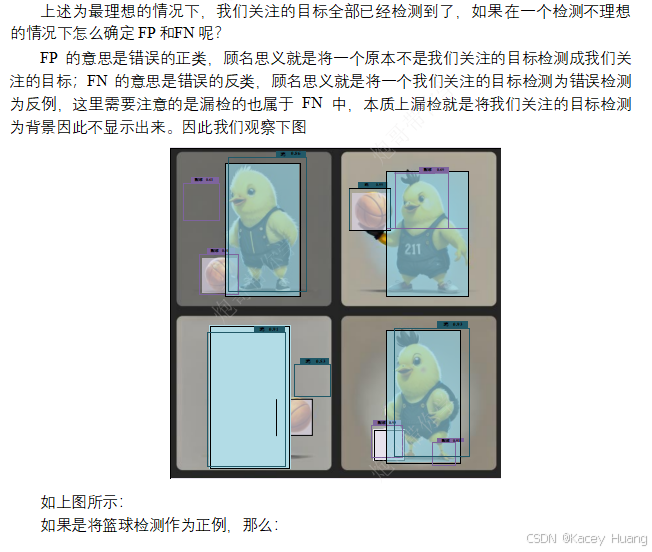
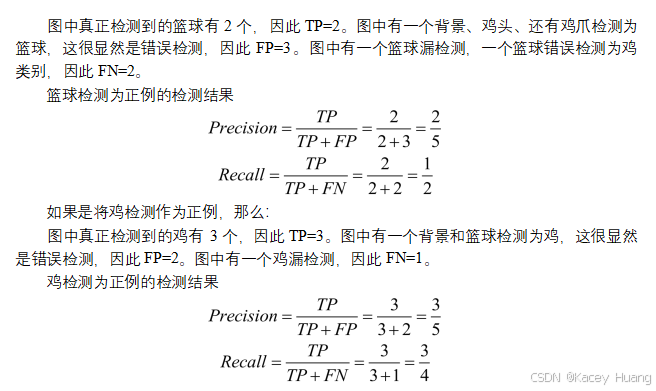
4.14 目标检测精度和召回计算
4.15 目标检测PR曲线和MAP指标
PR曲线: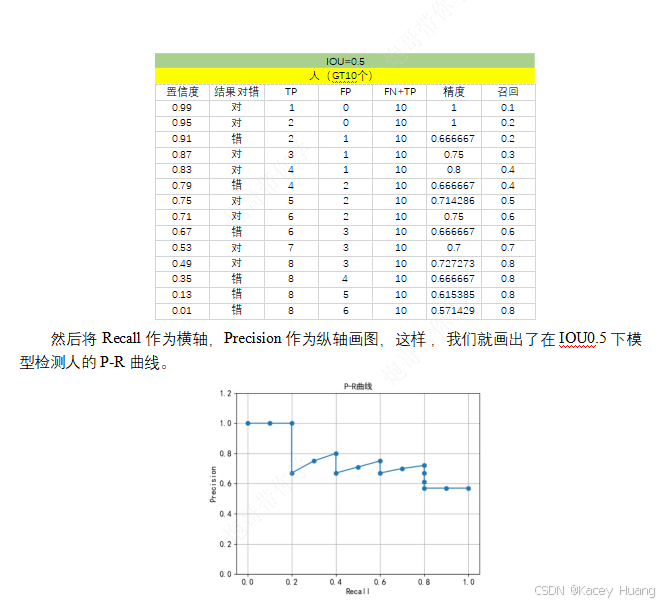
mAP: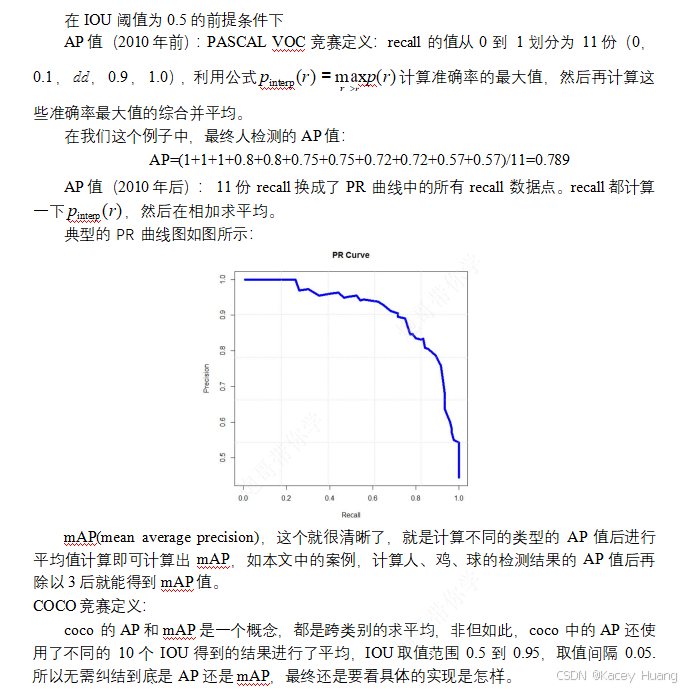
4.16 模型检测速度评价指标
检测速度,简单的说就是一秒钟能够检测多少张图片。
更多推荐


 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)