
从零开始学目标检测|YOLO 系列从入门到部署
把图像划分成网格,每个网格预测多个预设形状的“锚框”(anchor),再微调偏移量得到最终检测框。为方便大家学习 这里给大家整理了一份系统学习资料包 需要的同学 根据下图指示自取就可以。:浅层特征分辨率高(适合小目标),深层特征语义强(适合大目标)。:同一个目标可能产生多个检测框,按置信度排序,IOU>阈值的框被抑制,只保留最优一个。:损失函数直接决定收敛速度和精度,YOLOv8/v10已优化为更
目标检测行业价值、单阶段检测优势、YOLO核心地位
2026年,目标检测仍是CV落地最核心的技术:安防监控、自动驾驶、工业质检、无人机巡检、医疗影像……所有“让机器看懂物体位置和类别”的场景都离不开它。
行业价值:
- 实时性决定生死:传统两阶段检测(Faster R-CNN)精度高但速度慢,单阶段检测(YOLO系列)把FPS从10+提升到100+,真正实现“边看边决策”。
- YOLO核心地位:从2015年YOLOv1到2024年的YOLOv10,Ultralytics官方版本已成为工业标配——开源、易用、精度与速度完美平衡。
- 零基础友好:只需Python + Ultralytics库,单卡3090就能训练70B参数量级模型。
核心知识点:YOLO = You Only Look Once,一次前向传播同时完成定位+分类,是单阶段检测的王者。
为方便大家学习 这里给大家整理了一份系统学习资料包 需要的同学 根据下图指示自取就可以
模块一:底层原理精讲(锚框机制、特征金字塔、非极大值抑制、损失函数)
1.1 锚框机制(Anchor Box)
通俗原理:把图像划分成网格,每个网格预测多个预设形状的“锚框”(anchor),再微调偏移量得到最终检测框。
图文示意:网格 + 锚框 + 负责预测机制。
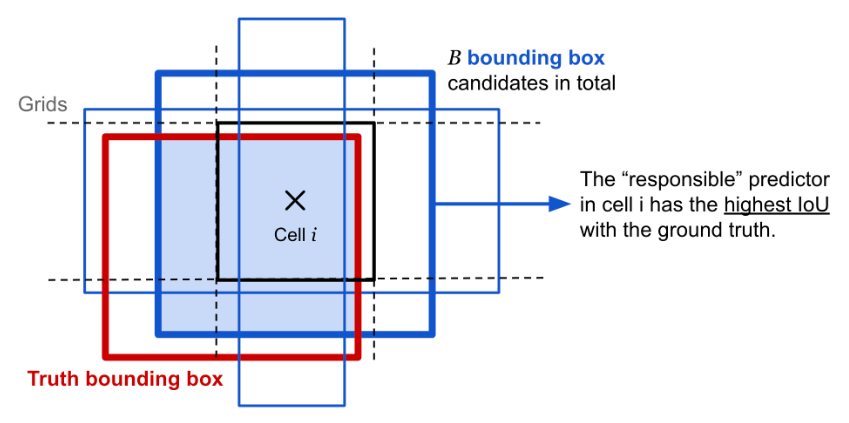
必记要点:YOLOv8/v10已转向无锚框(Anchor-Free),直接回归中心点+宽高,减少超参数,泛化更好。
1.2 特征金字塔(Feature Pyramid)
原理:浅层特征分辨率高(适合小目标),深层特征语义强(适合大目标)。金字塔结构把两者融合。
图文示意:FPN结构(自顶向下 + 横向连接)。
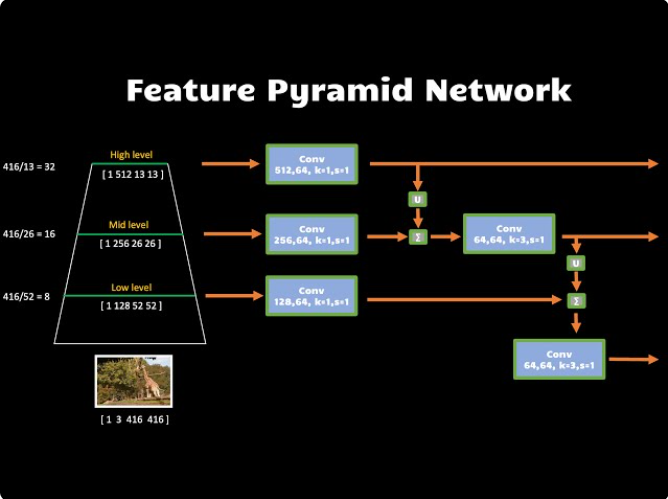
核心知识点:YOLOv8采用PAN-FPN(路径聚合网络),多尺度融合更高效。
1.3 非极大值抑制(NMS)
原理:同一个目标可能产生多个检测框,按置信度排序,IOU>阈值的框被抑制,只保留最优一个。
图文示意:NMS前后对比(重叠框→单一框)。
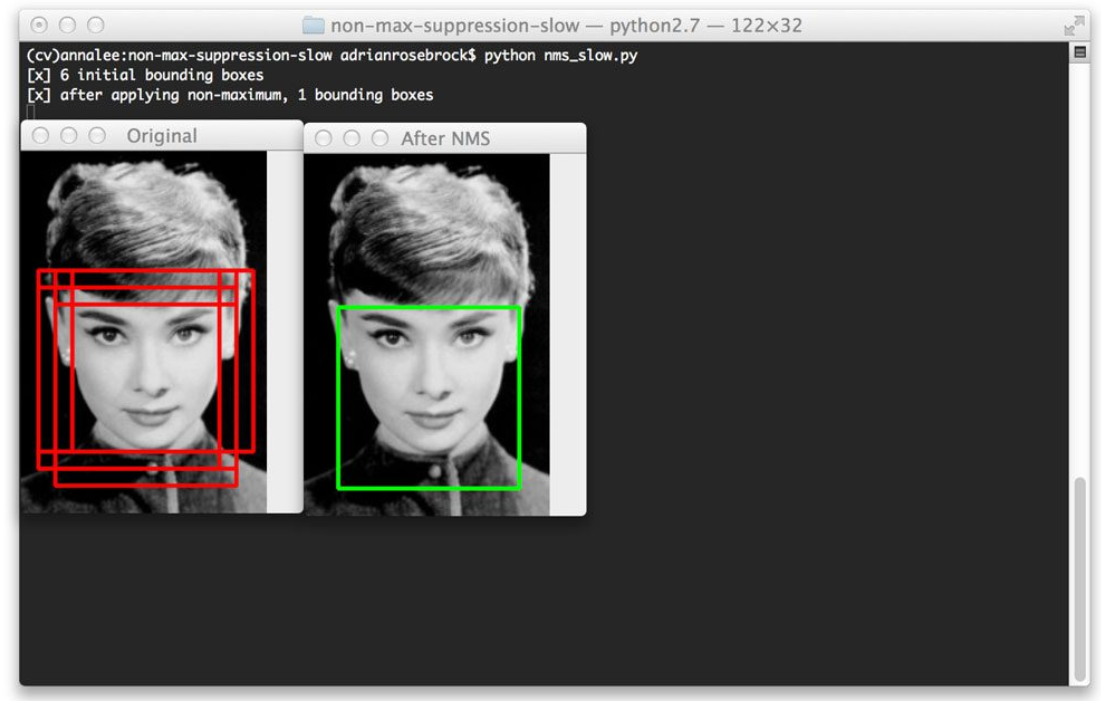
工业级技巧:YOLOv10使用NMS-Free(端到端),推理更快。
1.4 损失函数
YOLO损失 = 定位损失 + 分类损失 + 置信度损失。
常用CIoU(考虑重叠、中心距、宽高比)代替普通IOU。
图文示意:YOLO损失组成公式可视化。
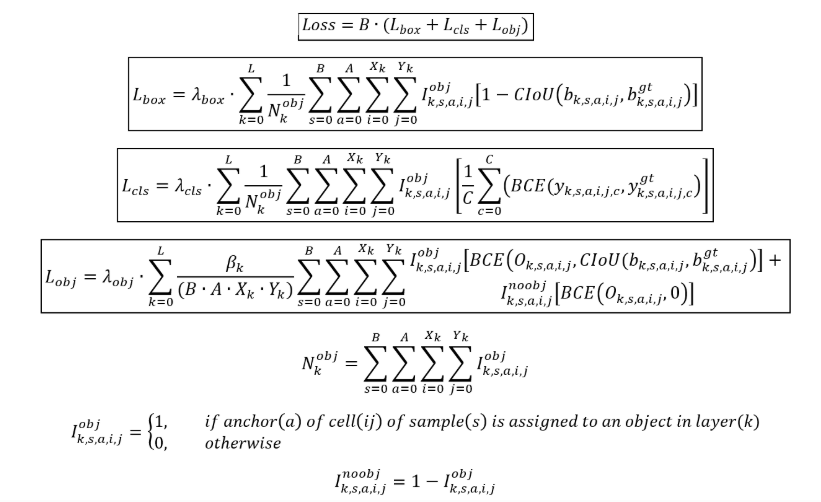
核心知识点:损失函数直接决定收敛速度和精度,YOLOv8/v10已优化为更鲁棒的变体。
模块二:YOLO系列迭代解析(v5/v8/v10核心差异、选型技巧)
YOLO系列演进时间线(快速选型):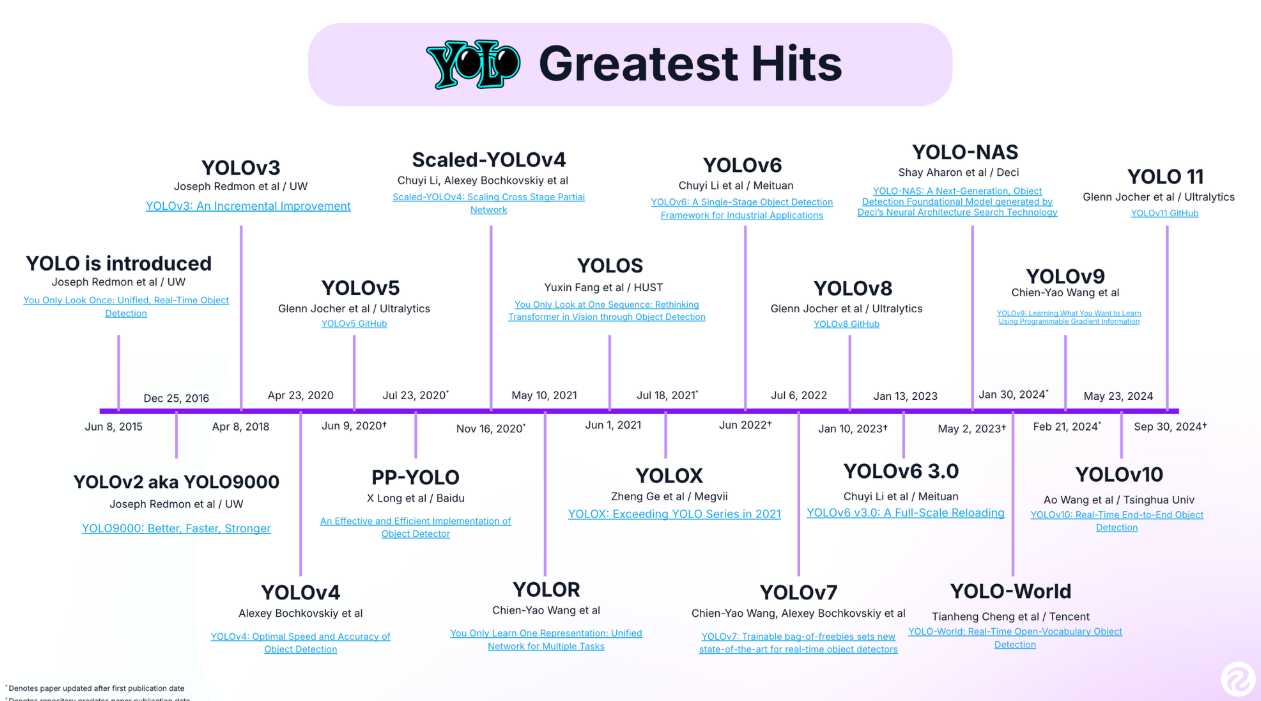
核心差异对比表:
| 版本 | 核心创新 | 速度(FPS) | 精度(mAP) | 推荐场景 | 推荐指数 |
|---|---|---|---|---|---|
| YOLOv5 | CSPDarknet + Mosaic增强 | 极高 | 高 | 快速原型、边缘设备 | ★★★★ |
| YOLOv8 | Anchor-Free + C2f模块 | 更高 | 更高 | 工业主力、平衡型 | ★★★★★ |
| YOLOv10 | NMS-Free + 双头解耦 | 最高 | 最高 | 实时高精度、安防/自动驾驶 | ★★★★★ |
选型技巧(必记):
- 追求速度 → YOLOv5s/v8n
- 追求精度 → YOLOv10x
- 边缘部署 → YOLOv8n + TensorRT
- 工业主力 → YOLOv8(生态最完善)
模块三:训练部署实操(数据集制作、参数调优、模型导出)
Ultralytics YOLO(2026主流) 一行代码搞定训练。
3.1 数据集制作(YOLO格式)
- 标注工具:LabelImg 或 Roboflow(推荐)
- 目录结构:
dataset/ ├── images/ │ ├── train/ │ ├── val/ └── labels/ ├── train/ # .txt文件,每行 class x_center y_center w h(归一化) └── val/
3.2 完整训练代码(逐行解析,YOLOv8示例)
from ultralytics import YOLO
# 1. 加载模型(预训练权重自动下载)
model = YOLO("yolov8n.pt") # n/s/m/l/x 不同大小
# 2. 训练(核心参数)
model.train(
data="data.yaml", # 数据集配置文件
epochs=100, # 轮次
imgsz=640, # 输入尺寸
batch=16, # 批次(根据显存调整)
workers=8, # 数据加载线程
device=0, # GPU编号
patience=50, # 早停
optimizer="AdamW", # 优化器
lr0=0.01, # 初始学习率
lrf=0.01 # 最终学习率
)
# 3. 验证
model.val()
# 4. 导出(多格式)
model.export(format="onnx") # ONNX
model.export(format="engine") # TensorRT(最快)
参数调优技巧:
- imgsz=640是甜点,过大会显存爆炸。
- batch根据显存:3090建议16-32。
- Mosaic增强默认开启,关闭后小目标精度提升。
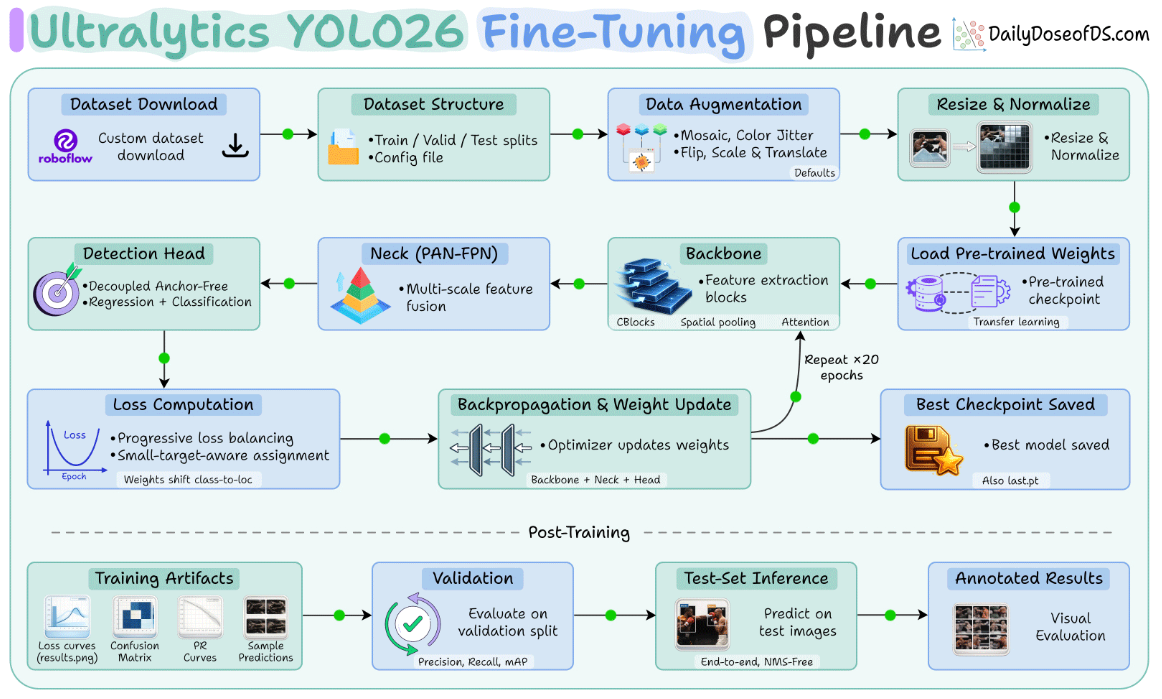
训练流程示意:
](https://i-blog.csdnimg.cn/direct/575958bcb0184d15967743e3f1f8c7ab.png)
模块四:精度优化+工程部署+避坑经验+进阶路线
4.1 精度优化
- 数据增强:Mosaic + MixUp + HSV
- 超参搜索:Ultralytics内置Hypertuning
- 模型剪枝 + 量化(INT8)→ 速度×2,精度掉<1%
4.2 工程部署
- TensorRT:
model.export(format="engine")后FPS可达200+ - ONNX Runtime:跨平台(Windows/Linux/边缘)
- OpenVINO:Intel CPU最优
- Docker一键部署:官方提供Dockerfile
4.3 Top 10避坑经验(血泪史)
- 数据集标签没归一化 → 训练直接NaN。
- 不看val曲线 → 过拟合完全不知道。
- batch太大 → OOM,用gradient accumulation。
- 只训一个epoch → 精度低,用early stop。
- 导出没指定half → FP16提速明显。
- NMS阈值默认0.45 → 密集场景调低到0.3。
- 没用pretrained → 从头训慢10倍。
- 测试图分辨率不匹配 → imgsz必须一致。
- 多类不平衡 → 用class weights。
- 生产不量化 → 延迟翻倍。
4.4 进阶路线(规划师视角,3个月速成)
- 第1个月:跑通YOLOv8全流程 + 自定义数据集项目。
- 第2个月:YOLOv10 + 精度优化 + TensorRT部署。
- 第3个月:ByteTrack多目标跟踪 + YOLO-World零样本检测。
- 6个月后:自研YOLO变体 + 边缘端部署,成为“目标检测工程师”。
- 12个月目标:企业级项目(缺陷检测/安防),简历亮眼。
对于需要系统学习 需要我们规划指导的同学 可以扫码与我们交流
更多推荐

 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)